基于stm8L单片机的IrDA红外数据通讯实验
作者: 立创赵工
1、作品简介
最近发现立创商城上有个IrDA收发器出现!玩够了常见的WIFI、蓝牙、GPRS、2.4G nRF24L01电子器件和模块,笔者对IrDA还是没用过,决定尝尝鲜咯!因此,做了下面这个IrDA红外数据通讯实验。
实验板外形图:
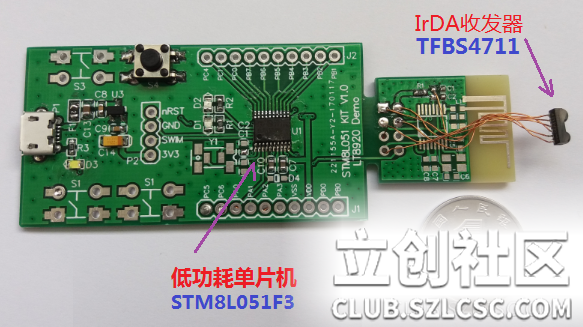
PS: 这个实验板,因为电路较简单,笔者采用的是立创商城上,下单即可免费拿的“STM8L051+LT8920+ME6209的评估板模块(PCB空板)”进行改装的,该板的商品编号是:C94731。
什么是IrDA? 顺此,先给大家简单介绍一下:
IrDA是红外数据组织(Infrared Data Association)的简称,目前广泛采用的IrDA红外连接技术就是由该组织提出的.到目前为止,全球采用IrDA技术的设备超过了5000万部。 IrDA已经制订出物理介质和协议层规格,以及2个支持IrDA标准的设备可以相互监测对方并交换数据。 初始的IrDA1.0标准制订了一个串行,半双工的同步系统,传输速率为2400bps到115200bps,传输范围1 m,传输半角度为15度到30度。最近IrDA扩展了其物理层规格使数据传输率提升到4Mbps。
IrDA数据协议由物理层,链路接入层和链路管理层三个基本层协议组成,另外,为满足各层上的应用的需要,IrDA栈支持IrLAP, IrLMP, IrIAS, IrIAP, IrLPT, IrCOMM,IrOBEX和IrLAN等。
需要特别指出的是:本实验只是IrDA物理层的通讯实验。
2、作品亮点
① 所选用的IrDA收发器TFBS4711是一个小体积的红外收发模组,尺寸6x3x1.9mm。
② 符合IrPHY1.2 标准,IrFM快速链接需求。
③ 通信速率:115.2kbs (SIR),支持双向、全半工的通讯链接。
④ 可实现的直线通讯距离:~1米。
⑤ 使用内置支持IrDA底层信号编码和解码的低功耗单片机STM8L051F3P6做主控。
⑥ 该IrDA模组耗电量极小,关断电流只有大概10nA。
⑦ 采用最常用的MicroUSB插座作为电源输入接口。
⑧ 本实验所用的IrDA通信具有功耗低、链接时间短、通信安全、无电磁干扰等优点!
3、硬件原理图描述
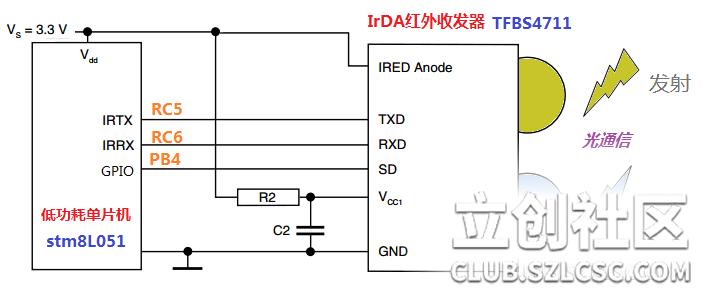
首先,我们先来这个实验电路的构架图:
其中,单片机驱动部分的原理图,可为多个部分,下面逐个介绍:
第一部分: 单片机主控部分
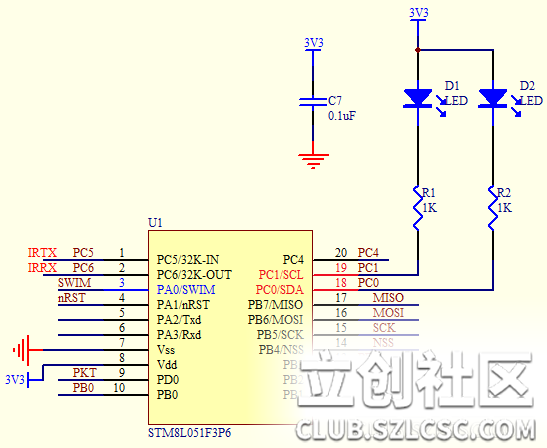
备注说明: 上图采用ST公司的低功耗单片机STM8L051F3P6进行设计,该单片机的PC5和PC6分别链接到IrDA收发器TFBS4711的TX和RX端口,而单片机的PB4用来控制TFBS4711的电源使能端,当PB4=0的时候,IrDA收发器才可正常工作,反之PB4=1,那么IrDA收发器关断,此时的耗电量极少噢!D1和D2是工作状态指示灯,分别连接到PC0、PC1。
第二部分:单片机外围部分
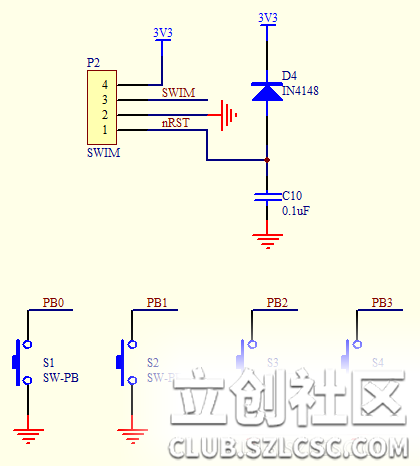
备注说明: 如上图所示,P2是SWIM接口,单片机STM8L051F3P6的程序,可通过ST-LINK/V2 开发工具对该芯片下载或仿真。而S1~S4是轻触按键,本实验电路,只焊接安装了S4按键,因为其它按键用不到。
第三部分:系统的供电电源部分
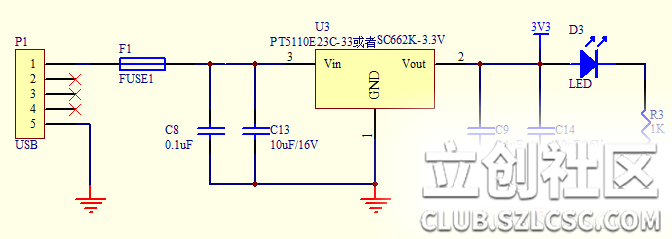
备注说明: 如上图所示,F1是可恢复保险丝(0.2A), U3是3.3V的LDO。D3是电源指示灯。
第四部分:IrDA模组TFBS4711的相关简介
TFBS4711是一个小体积的红外收发模组,它支持半双工的IrDA红外通信,传输速率可达115 .2kbit/s(SIR). 模组内部包含了一个PIN类型的光电二极管、一个红外发射管(IRED)和一个低功耗的CMOS控制芯片。它是为低功耗的IRDA标准而设计,直线通信高达至1米。支持低功耗模式,当SD引脚有效的时候,这个模组的电流消化才10nA左右。相比一般的无线电传输(蓝牙、WIFI、2.4G nRF24系列等等),红外传输具有无电磁干扰、通信距离短但安全性高、使用简单的特点,比如STM8或者STM32一般都集成了IrDA的硬件支持单元,结合使用TFBS4711即可快速建立起一个基于光技术的“无线”数据通信系统。

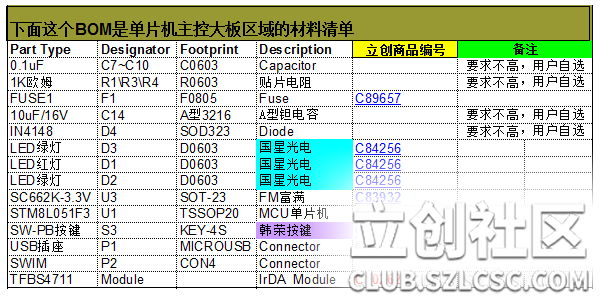
4、材料清单(BOM列表)
以下是这个电子制作的BOM列表,器件全部采购来自立创商城(http://www.szlcsc.com),PCB板的制造在深圳嘉立创完成。
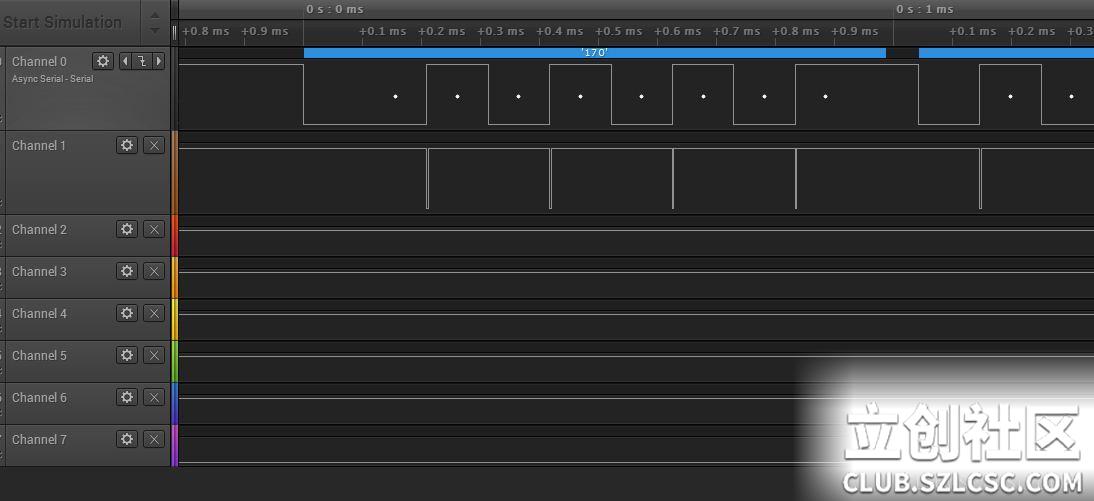
5、软件部分的描述
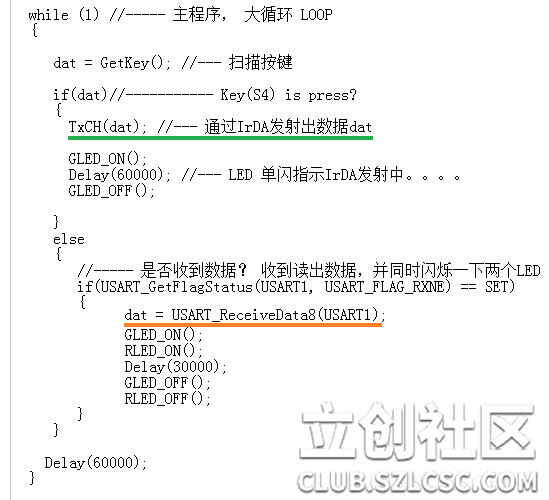
本实验的主控单片机stm8L051F3P6 使用IAR公司的编译器进行软件开发,结合ST官方网站可下载的stm8L函数驱动库,进行coding。软件实现的主要功能是,按键S4触发后,两块同样配置和固件的PCBA板之间进行数据信息的交换,驱动LED等等。如下是实验代码的关键片段:
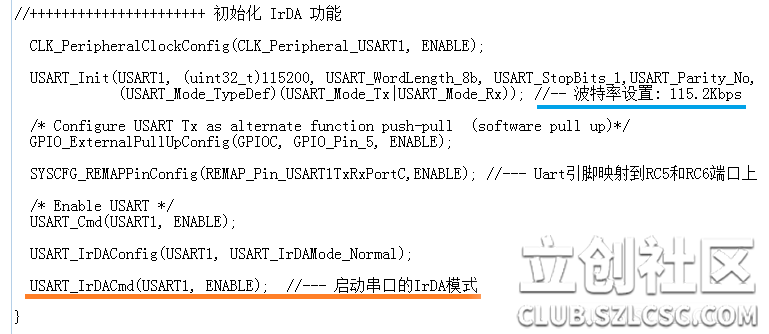
6-1、单片机stm8L051F3P6的IrDA 初始化片段
6-2、主控程序片段
PS: 该实验的完整软件、工程源码在这里,点击下载:TFBS4711的IrDA测试工程源码.rar
6、现场试验&视频
具体的实验视频链接如下:
http://v.youku.com/v_show/id_XMjc2NzUxNDQwMA==.html

7、总结
通过以上相关实验介绍,特别是视频方面的功能演示,相信大家对IrDA有了一定的了解。相比一般的无线电传输(蓝牙、WIFI、2.4G nRF24系列等等),红外传输具有无电磁干扰、通信距离短但安全性高、使用简单的特点,STM8或者STM32一般都集成了IrDA的硬件支持单元,操作IrDA就像操作串口一样简单!结合使用IrDA器件TFBS4711即可快速建立起一个基于光技术的“无线”数据通信系统。后续,我们将通过光纤的引入,进一步来介绍TFBS4711的高级应用,比如可隔离数万伏高电压的远距离数据通信或完整的IrDA协议栈功能应用等等。。。




 返回列表
返回列表


 发表于2017-05-17 10:39:42
发表于2017-05-17 10:39:42




 回复
回复
 收藏
收藏
 举报
举报