小型直流无刷电机的控制系统(一)
随着永磁新材料、微电子技术、自动控制技术以及电力电子技术特别是大功率开关器件的发展,无刷直流(BLDC)电机得到了迅速的发展。近几年来,直流无刷电机以其高效率,噪声小,结构紧凑,稳定可靠等优点快速进入家用电器、无人机、汽车电子等领域。
无刷直流电机分为有位置传感器(简称有感)和无位置传感器(简称无感)两种。但这两种电机的控制方式大同小异,一般都是用6步换相驱动转子转动。无感无刷电机省去了位置传感器,降低了去了系统的成本和复杂性,但却增加了控制系统设计的难度。本次以无感无刷电机为例讲解无刷直流电机的控制系统。
所谓的无位置传感器控制,正确的理解应该是无机械的位置传感器控制, 在电机运转的过程中,作为逆变桥功率器件换向导通依据的转子位置信号仍然是需要的,只不过这种信号不再由位置传感器来提供,而应该由新的位置信号检测措施代替,即用提高电路和控制的复杂性来降低电机的复杂性。所以,无刷直流电机无位置传感器控制研究的核心和关键是构架一个转子位置信号检测电路,用软件或者硬件两个方面来间接获得可靠的转子位置信息,然后触发导通相应的功率器件,驱动电机运转。
对于三相的无刷直流电机,多采用6步120度导通模式。任意时刻,电机的三相中只有两相通电。例如,当B相和C相导通时,A相是悬空的。这种状态持续60电角度,称作一步。
从一步切换到另一步的操作称为换相。可以得出,在一个周期中共有6个步,设第一步是AB,则接下来是AC、BC、BA、CA、CB,周而复始,直至停机。
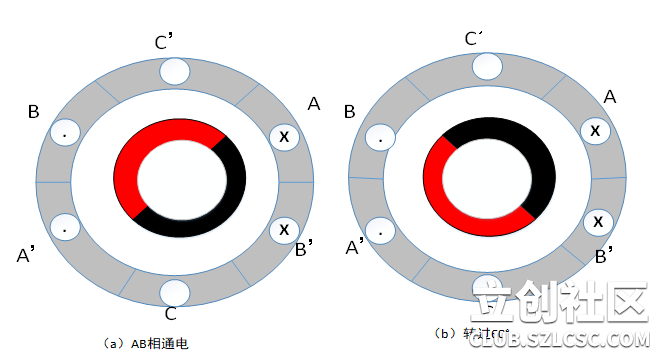
大多数情况下,电机中的电流就是这么换向的,在转子转动的过程中,悬空相切割永磁体磁感线产生感应电动势,称为反电动势(BEFM, Back Electromotive Force)。在电机运行期间,由于只有两相导通电流,第三个线圈是开路的。这为在悬空的线圈中检测反电动势打开了突破口。为了说明如何利用悬空相的反电动势来测量转子位置,现分析在无刷直流电机在转动过程中悬空相的反电动势情况。如图所示,在AB相通电期间,观察C相,为便于说明情况,我们定义:在转子逆时针旋转时,C边切割N极磁力线和C’边切割S极磁力线产生的感生电动势为正,AA’和BB’也用类似的定义。先看图(a)和图(b),在AB通电期间,我们发现线圈CC’的C边在图(a)中切割N极的磁力线并产生一个正向的感应电动势,在图(b)中却是切割S极的磁力线而产生一个反向的感生电动势了。C’边的情况也类似。这说明,如果我们在AB相通电期间,去测量线圈CC’上的电压,会发现其间会有一个从正到负的变化过程。其他相通电情况与此类似。
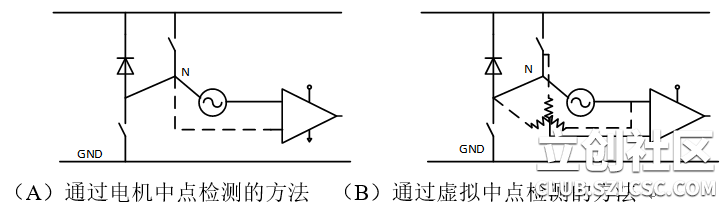
我们可以直接测量悬空线圈的端电压,但是要想获得反电动势过零点,就需要测量电机的中点电压,因为反电动势的电压和电机的中点电压有关,比较电机中点和端电压就可获得反电势过零点。
通常情况下,我们无法直接测量电机的中点电压,因为电机的中点是没有引出来的。实际上,最常见的方法是建立一个虚拟的中点。理论上,这个虚拟中点的电势和Y型连接电机的中点电势相同。然后,比较悬空线圈的端电压和中点即可获得反电动势过零。虚拟中点是由电阻构建的如图所示,这个方法很简单,从发明到现在用了很长一段时间。
但这个方法也是有一些缺点的。由于采用PWM(Pulse Width Modulation)驱动,导致中点电压不是静止的,而是上下跳动的。这样就会产生很高的共模电压和高频噪声。为了降低共模电压和高频噪声,我们需要采用分压器和低通滤波器。但是加入分压器在低速时会减弱信号的敏感性,尤其是在启动的时候。另外,低通滤波器会产生延迟,并且延迟的比例会随着转子速度的增加而增加。这个延迟会妨碍反电势电流的校准,并且在转子速度较高时会造成错误换相的问题。因此,这种方法会使电机的速度范围变窄。
采用PWM_OFF检测反电动势,也就是在续流期间检测反电动势信号。我们知道,由于采用PWM进行电压调制,电机的中点电压并不是不变的,而是跳变的。但是如果选择合适的PWM控制方式,比如让反电动势的电压以地为参考,就可以方便地从电机端电压中得到反电动势电压。
PWM_OFF反电动势检测技术的优势如下:
(1) 高灵敏度。因为我们没有使用分压器,所以不存在延迟,在低速运行时仍然具有很高的分辨率。另外,我们是在续流期间对反电动势信号采样,所以没有高频噪声开关。再加上反电动势是相对于参考地的,大大减少了共模电压。所以,这种方法具有很好的灵敏度。
(2) 实时性好。电路中没有使用滤波器,不存在延迟,在高速运行时也适用。
(3) 准确性好。可以很精确的检测反电动势过零事件,有助于电机的快速启动。
结构简单易于实现。
控制系统的结构
该控制系统的控制过程为:STM32F103RCT6单片机的AD转换器采集电机悬空相的电流信息,开设AD转换的DMA通道,将采集的电流信息直接赋值给相关变量,然后对该变量进行处理,判断过零事件。如果过零事件发生,则执行换相操作,否则,一直监视悬空相的电流。我们利用定时器产生的互补PWM对上桥臂和下桥臂的功率器件进行驱动,比如在AB相导通的时刻,A相上桥臂和下桥臂功率器件输出互补PWM,B相下桥臂功率器件保持导通状态,其余功率器件关断。其他情况与此类似。
至此第一篇结束,在接下来的内容中会对电路的系统结构和主控等做介绍和说明哦!




 返回列表
返回列表


 发表于2019-01-23 13:56:08
发表于2019-01-23 13:56:08




 回复
回复
 收藏
收藏
 举报
举报


