第十章 PWM输入捕获试验
上一章,介绍了 W7500 的 PWM 输出模式的使用方法,这一章,将向大家介绍W7500 的 PWM 输入捕获模式的使用。在本章中,将PWM作为输入捕获模式,另外在初始化PA10引脚,PA10引脚不断的改变自身的电平,利用PWM的捕获功能来捕获该引脚。
章分为如下几个部分:
10.1 输入捕获简介
10.2 硬件设计
10.3 软件设计
10.4 下载验证
10.1 输入捕获简介
当外部输入信号改变时,PWM就会捕获该通道定时器的值。 该通道可以选择在上升沿捕获或下降沿捕获的方式。如果捕获中断被启用,当外部输入信号被切换时捕获中断就发生。定时器的值被保存在 Channel-n 捕获寄存器中,直到中断被清除捕获寄存器才会被重写,如图10.1.1所示:

图10.1.1 带有中断清除的捕获事件
他的配置流程在上一章讲过了这里就不重复了。
可以调用PWM_CaptureModeInit函数来初始化PWM的捕获模式。
void PWM_CaptureModeInit(PWM_CHn_TypeDef* PWM_CHn, PWM_CaptureModeInitTypeDef* PWM_CaptureModeInitStruct);
PWM_CaptureModeInit函数的是针对PWM捕获模式写的,所以配置他的结构体也不一样,下面看看他的结构体成员。
typedef struct
{
uint32_t PWM_CHn_PR;
uint32_t PWM_CHn_MR;
uint32_t PWM_CHn_LR;
uint32_t PWM_CHn_UDMR;
uint32_t PWM_CHn_PDMR;
uint32_t PWM_CHn_CMR;
}PWM_CaptureModeInitTypeDef;
可以看到这个结构体包含了如下几个成员:
参数PWM_CHn_PR设置预分频寄存器。
参数PWM_CHn_MR设置匹配寄存器。
参数PWM_CHn_LR设置边界寄存器。
参数PWM_CHn_UDMR设置上下模式寄存器。
参数PWM_CHn_PDMR设置周期模式寄存器。
参数PWM_CHn_CMR设置PWM的捕获模式寄存器。
针对 PWM通道0 的捕获模式初始化范例代码格式:
PWM_CaptureModeInitTypeDef PWM_CaptureModeInitStruct;
PWM_CaptureModeInitStruct.PWM_CHn_PR = 50;
PWM_CaptureModeInitStruct.PWM_CHn_LR = 10000;
PWM_CaptureModeInitStruct.PWM_CHn_UDMR = PWM_CHn_UDMR_UpCount;
PWM_CaptureModeInitStruct.PWM_CHn_PDMR = PWM_CHn_PDMR_Periodic;
PWM_CaptureModeInitStruct.PWM_CHn_CMR = PWM_CHn_CMR_RisingEdge;
PWM_CaptureModeInit(PWM_CH0, &PWM_CaptureModeInitStruct);
PWM_CHn_SetPEEER(PWM_CH0, PWM_CHn_PEEER_ExtEnable);
PWM_CHn_Start(PWM_CH0); //开启定时器PWM_CHn_Start(PWM_CH0);
10.2 硬件设计
本实验用到的硬件资源有:
1) UART2
2) PWM
3) 杜邦线
10.3 软件设计
打开输入捕获实验,可以看到,工程和上一个实验没有什么改动。因为输入捕获代码是直接添加在 pwm.c 和 pwm.h 中。
在pwm.c 里面加入如下代码:
void PWM_Input(void)
{
PWM_CaptureModeInitTypeDef PWM_CaptureModeInitStruct;
PWM_CaptureModeInitStruct.PWM_CHn_PR = 50;
PWM_CaptureModeInitStruct.PWM_CHn_LR = 10000;
PWM_CaptureModeInitStruct.PWM_CHn_UDMR = PWM_CHn_UDMR_UpCount; //递增计数
PWM_CaptureModeInitStruct.PWM_CHn_PDMR = PWM_CHn_PDMR_Periodic; //循环模式
PWM_CaptureModeInitStruct.PWM_CHn_CMR = PWM_CHn_CMR_RisingEdge; //上升沿捕获
PWM_CaptureModeInit(PWM_CH0, &PWM_CaptureModeInitStruct);
PWM_CHn_SetPEEER(PWM_CH0, PWM_CHn_PEEER_ExtEnable); // 使能输出禁止输入使能
PWM_CHn_Start(PWM_CH0); //开启定时器
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_Init(GPIOC, &GPIO_InitStructure);
PAD_AFConfig(PAD_PC, GPIO_Pin_0, PAD_AF2);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_Init(GPIOA, &GPIO_InitStructure);
PAD_AFConfig(PAD_PA, GPIO_Pin_10, PAD_AF1);
}
在main.c 里面加入如下代码:
int main()
{
/* 炜世科技—WIZnet W7500官方代理商,全程技术支持,价格绝对优势!*/
SystemInit(); /* 系统内部时钟初始化 */
delay_init(); /* 系统滴答时钟配置*/
S_UART_Init(115200); /* 初始化串口通信:115200@8-n-1*/
PWM_Input(); /* PWM 捕获模式初始化 */
printf("PWM捕获测试\r\n");
while(1)
{
GPIO_SetBits(GPIOA, GPIO_Pin_10);
delay_ms(1000);
GPIO_ResetBits(GPIOA, GPIO_Pin_10);
delay_ms(1000);
printf("CR=%d\r\n",PWM_CHn_GetCR(PWM_CH0));
}
}
10.4 下载验证
在完成软件设计之后,将编译好的文件下载到W7500 开发板上,再打开串口调试助手,选择对应的串口,然后可以看到PWM通道1捕获到的数据,如图10.4.1所示:
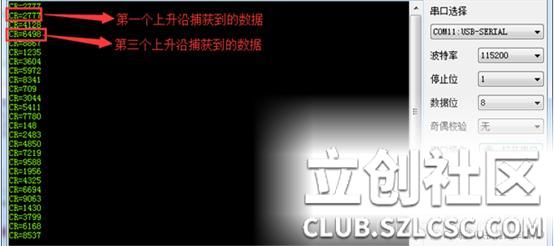
图10.4.1 W7500EVB PWM捕获试验结果




 返回列表
返回列表


 发表于2018-03-07 18:05:27
发表于2018-03-07 18:05:27



 回复
回复
 收藏
收藏
 举报
举报

