【报名阶段需要填写的内容】
1. 参赛者姓名(必填项):肖祥文,汤雨涵
2. 单位或学校名称(选填项):江西农业大学
3. 当前职务或职称(选填项):学生
4. 参赛作品的名字(必填项):基于无人机的气体环境监测与分析
5. 简要陈述您的idea和作品(必填项):
本项目是空气监测无人机,应用的领域是环保领域,对违规企业定点悬停采集空气污染气体,实时传输到工作站台,在上位机控制台上查看当前数据,数据精简明确,对相关人员作出决策具有非常大的帮助,本项目主要有的创新点在:
第一点:环保系统化工大气污染监测主要以定时地点的地面手工监测为主,鉴于化工大气污染排放的隐蔽性,污染事故突发性的特点,传统地面监测你很难满足环保部门的应急需求。因此我们组的想法是将无人机应用在环境保护的气体监测上面,这样既实现了监测范围广,对污染源分布、排污状况、项目建设情况精准定位的目的,又提高了工作效率。
第二点:鉴于气体数据具有数据量大,不稳定,分析任务繁重,难存储的缺点,我们小组制作了相关的数据上位机,对相关项目中接收来的气体数据经行整合,精确处理,存储在云服务器上面,可以实时查看,并且上位机上的数据显示精简明了,目的性高。
6. 拟用到的立创商城在售物料(必填项):
用立创的芯片并且PCB文件在立创进行打印成板子,预计会使用立创的EDA画图工具进行画原理图
7. 拟用到的非立创商城物料或其它补充(必填项):
用立创的芯片,打印pcb板,相关传感器。
8. 拟用到的EDA工具软件名称(必填项):
立创EDA原理图SCH、PCB图。
【作品正式发表(报名成功后进入设计阶段)需要填写的内容】
一、作品简介
1.作品的整机外观图片或焊接组装好的PCBA图片;
1.1硬件作品图


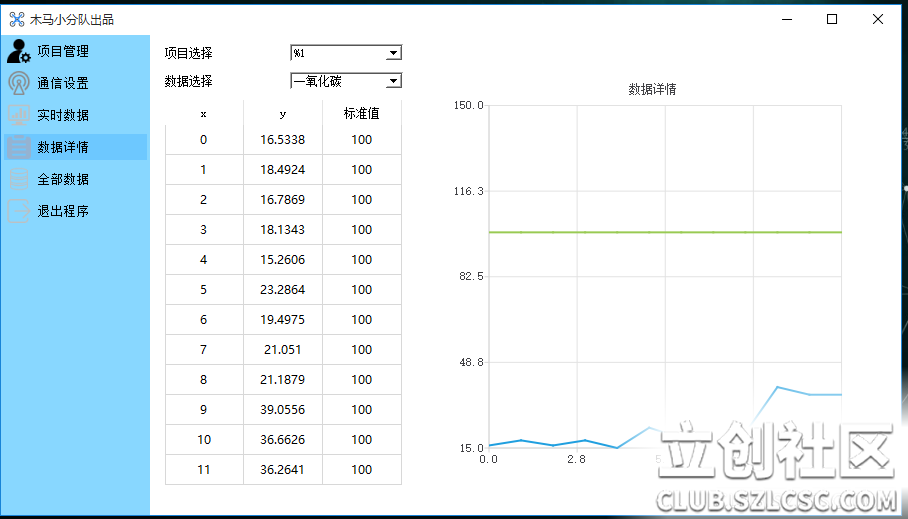
1.2软件作品图
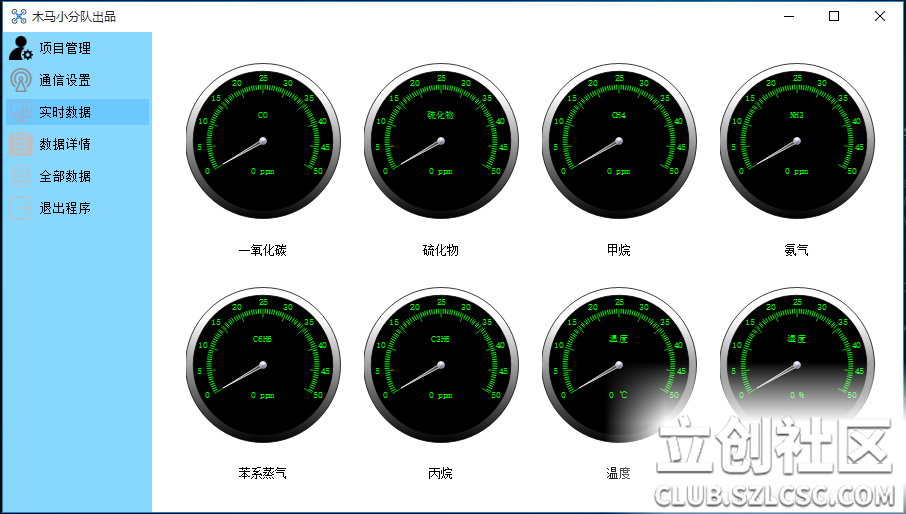
2.作品的研究背景、目的和功能、市场应用前景;
重点化工园区大气排放及污染监测已成为各级环保部门日常性工作目前,环保系统化工大气污染监测主要以定时地点的地面手工监测为主,鉴于化工大气污染排放的隐蔽性,污染事故突发性的特点,传统地面监测你很难满足环保部门的应急需求。因此我们组的想法是将无人机应用在环境保护的气体监测上面,这样既实现了监测范围广,对污染源分布、排污状况、项目建设情况精准定位的目的,又提高了工作效率。在无人机上搭载GPS进行输电线路的定位;搭载各类气体采集传感器,采集CO,SO2,NO2,O3等污染气体含量,将数据实时传输到控制台,对数据进行整合分析。
3.作品在创新性、趣味性、实用性甚至公益性方面,有哪些亮点可体现?
本项目是空气监测无人机,应用的领域是环保领域,对违规企业定点悬停采集空气污染气体,实时传输到工作站台,在上位机控制台上查看当前数据,数据精简明确,对相关人员作出决策具有非常大的帮助,本项目主要有的创新点在:
第一点:鉴于气体数据具有数据量大,不稳定,分析任务繁重,难存储的缺点,我们小组制作了相关的数据上位机,对相关项目中接收来的气体数据经行整合,精确处理,存储在云服务器上面,可以实时查看,并且上位机上的数据显示精简明了,目的性高。
第二点:环保系统化工大气污染监测主要以定时地点的地面手工监测为主,鉴于化工大气污染排放的隐蔽性,污染事故突发性的特点,传统地面监测你很无法满足环保部门的应急需求。而将无人机应用在环境保护的气体监测上面,这样既实现了监测范围广,对污染源分布、排污状况、项目建设情况精准定位的目的,又提高了工作效率。
第四点:易操作性,传统大气污染监测主要以定时地点的地面手工监测为主,然化工大气污染排放的隐蔽,污染事故突发性多,导致检测难度大,而基于无人机的气体检测方式则实现了空间多样监测,通过控制台进行全面操作,简单名了。加上近年来无人机技术已经十分成熟,操作十分简便。
第五点:安全性高,在气体监测方面,由于污染气体对工作人员危害极大,长久积累,对人体将导致越来越大的危害,而搭载了气体监测的无人机将工作人员与污染气体接触完全隔离开,出于对这方面的考虑,将无人机应用在环保领域是必然趋势。
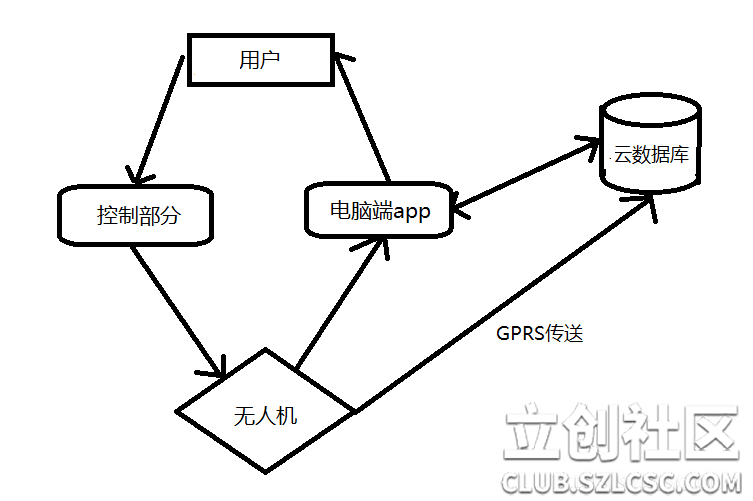
二、系统构架图
1. 当用户外出作业的时候,可以携带电脑也可以不携带电脑,无人机可以自己通过GPRS将数据传至云数据库,也可以通过将数据传至电脑app端,再通过app端将数据传至云数据库,存储起来,待以后查看使用,下图为用户使用图:
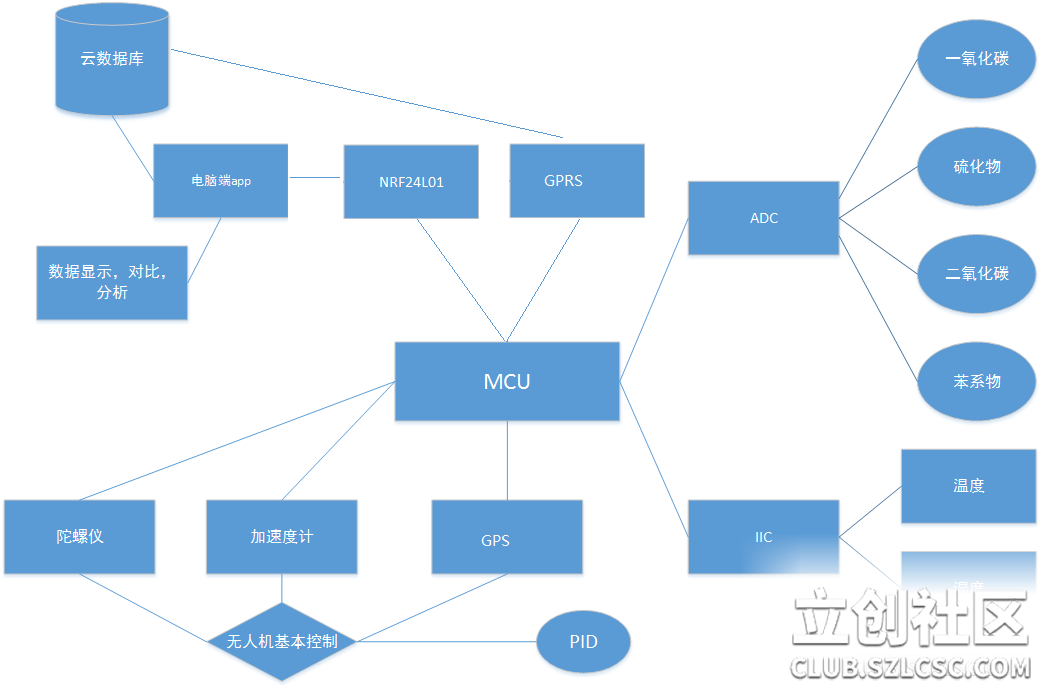
2.硬件各模块图:

3. 无人机基本原理图:

4. 硬件具体实现图:
三、硬件部分的描述
1.附上原理图&PCB实物图的图片或者源文件(官方建议大家尽量用源文件上传),如果是图片,请确保图片是清晰可辨的;
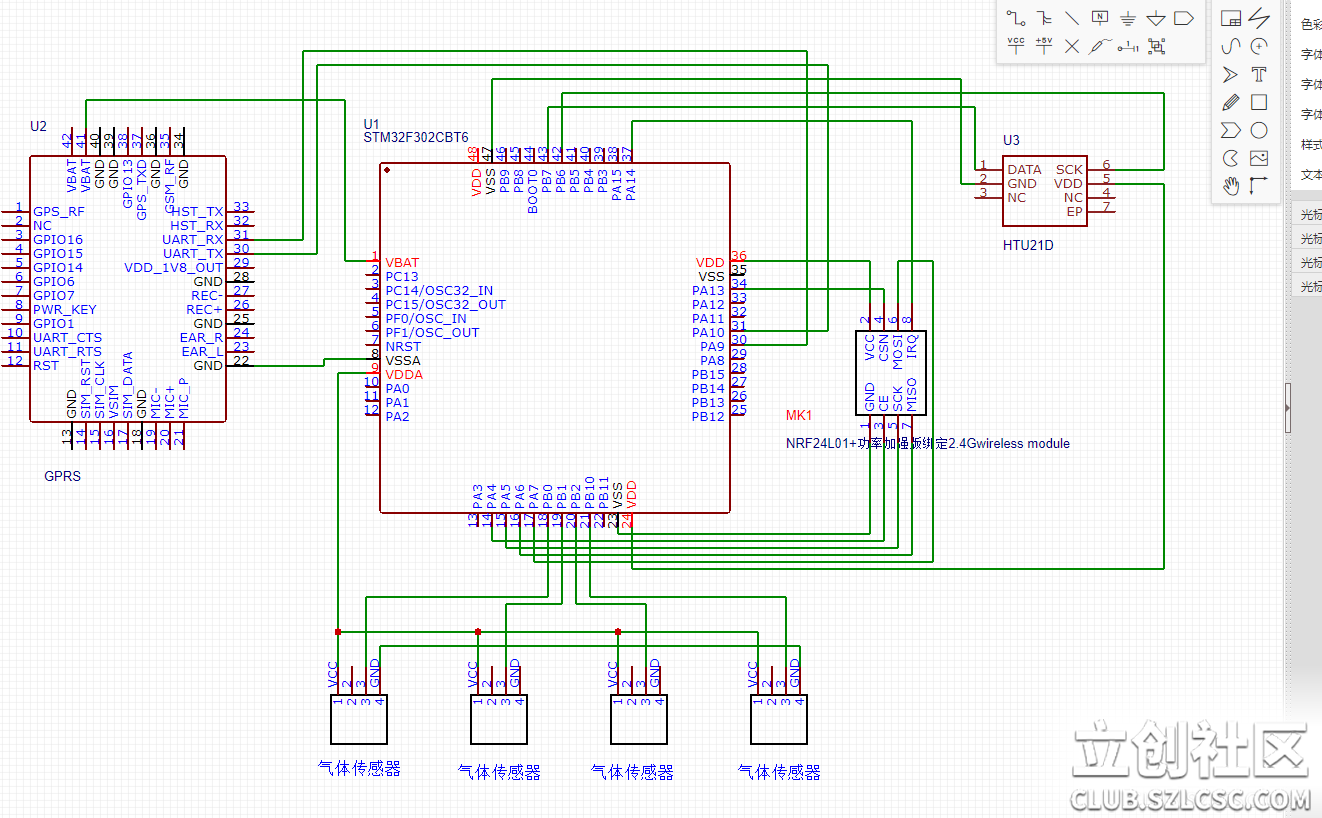
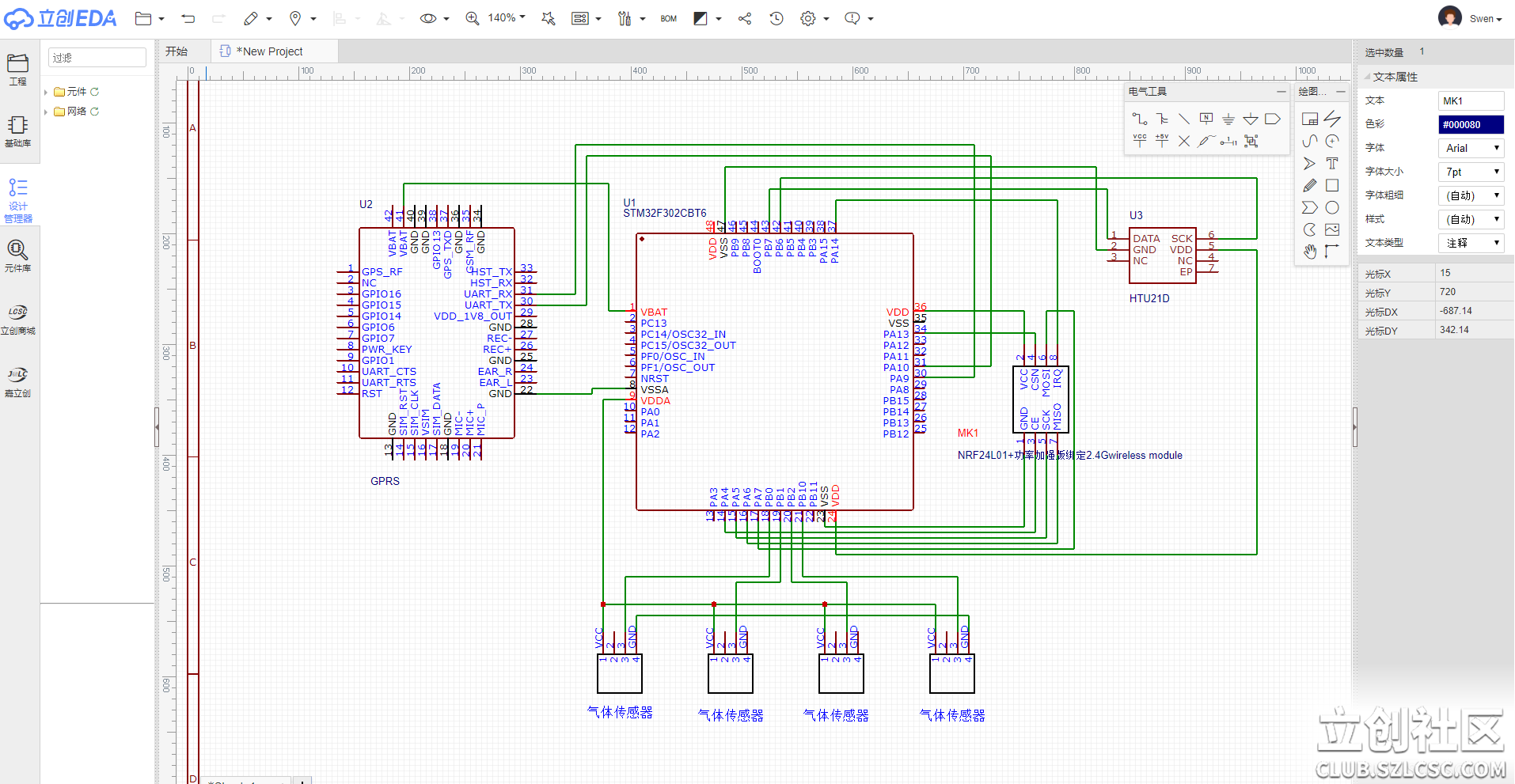
硬件原理图采用立创商城EDA工具进行设计,以下是设计的截图
原理图连接:https://lceda.cn/editor#id=|5d9b2175068841a6a982c52b1d93d5a0
2.用文字把该作品的实现原理、系统的工作过程大致讲解一下。
整套系统使用STM32作为硬件系统的主芯片,电脑上位机开发,机身采用轴距为400-500mm(裸机对角线尺寸)的四旋翼垂直起降无人机, 3S的锂电池供电,可以通过GPRS与云数据库直接通信,将数据传输存储下来,也可以通过NRF与上位机上的app进行信息通信,回传气体数据,再传输到云数据库中。各个气体传感器通过多路adc同时采集,进行滤波整理,定时传回上位机,温湿度传感器通过ii2进行数据采集。在完成硬件的搭建后,为了实现无人机的悬停定点,对空气中污染气体的采集,必须调节飞控中的PID参数,通过PWM调控无刷电机的参数达到静止的目的,即通过角度传感器和气压传感器实现无人机在空间内X,Y,Z坐标的相对静止。角度传感器能够获得在一个水平面上的X,Y坐标,而气压传感器能够得到高度z的坐标,结合这两个传感器得到的参数,控制PWM的输出即可实现悬停。其中,气压传感器,用于测量物体所在平面的高度。气压是由地表空气的重力所产生的。海拔高的地方,地表的空气厚度小,气压低;海拔低的地方,地表的空气厚度大,气压高。通过测量所在地的大气压值,与标准值比较,就可以获得物体所在位置的高度。再结合加速度计跟陀螺仪得到空间坐标,实现相对静止。
陀螺仪的数据是与角速度成正比,故只需确定比例系数即可,而加速度计的信号需要根据数据和实际角度的正余弦关系来获得,加速度计算角度的方法如图所示。
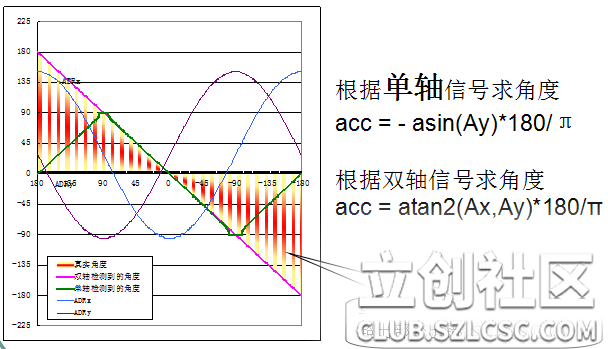
加速度计传感器的特点是无累积误差,长时间稳定。但是加速度计对震动非常敏感。电机转动以及路面崎岖等因素所产生的震动会有很大的噪声。同时当加速度计运动时,其输出量是运动加速度与重力加速度的混合数据,这会严重影响角度计算的准确性。
陀螺仪的优点是数据噪声较小,短时间内误差小。但是陀螺仪以及放大电路有温漂。同时积分会产生累积误差,这种误差会随着时间推移而越来越严重,导致数据失效。根据这两种传感器的特点,可以采用互补滤波的算法对两种传感器的数据进行处理。即在短时间内采用陀螺仪当前的采样数据,时间一长就用加速度计的数据来对陀螺仪的数据进行修正。即用加速度传感器长时间稳定的特性,弥补陀螺仪的零点漂移及A/D采样值单调性误差积累。
3.注明所用到的EDA工具软件名称并附上设计链接。
采用立创商城EDA设计原理图,以下是设计图片及链接:https://lceda.cn/editor#id=|5d9b2175068841a6a982c52b1d93d5a0
原理图截图:
四、材料清单(BOM列表)
系统主控芯片:STM32C8T6
系统调试工具:STLinK:立创商城购买链接https://item.szlcsc.com/198123.html
HTU21D模块:https://item.szlcsc.com/84644.html
NRF24L01模块:https://item.szlcsc.com/91939.html
GPRS模块: https://item.szlcsc.com/70231.html
五、软件部分的描述(选填)
硬件端代码:链接: https://pan.baidu.com/s/123Uv3cxr1RxRSgwx86Ligw 密码: bmds
电脑端代码:链接: https://pan.baidu.com/s/1u_GHcfulJSdJOhRMfM5cHA 密码: tfzq
六、作品演示
视频演示链接:https://v.qq.com/x/page/j06825owz0y.html
七、总结
我们团队在经历了两个多月的辛苦奋战之后,终于完成了我们的作品。从最初的想法到最终的作品出炉,我跟我的队员遇到了无数多的问题,我们一步一步的攻克,终于看到作品的出炉,难免抑制不住心中的喜悦,感谢我每个队员的努力付出,虽然作品还存在一些问题,但是我们还是会继续攻克,并且去努力的完善它。同时我们团队的每个人都非常开心可以参加这样一次比赛,让我们学到了很多,非常感谢立创商城给我们这样一次机会,我们会继续努力。




 返回列表
返回列表


 发表于2018-05-11 13:24:03
发表于2018-05-11 13:24:03




 回复
回复
 收藏
收藏
 举报
举报





