【报名阶段需要填写的内容】
1. 参赛者姓名(必填项):Mark
2. 单位或学校名称(选填项):
3. 当前职务或职称(选填项):
4. 参赛作品的名字(必填项):微型体测仪
5. 简要陈述您的idea和作品(必填项):随着生活质量越来越高,人们也愈加需要关注自己的健康状况,我想设计一种基于云平台+手机APP+设备端的体测系统,利用微弱信号检测电路、红外热释电路等实现人体参数的采集,数据通过无线网或其他方式上传云端存储。
6. 拟用到的立创商城在售物料(必填项):Esp8266、stm32、pl2303、12864、lm1117等
7. 拟用到的非立创商城物料或其它补充(必填项):电阻电容等小元件
8. 拟用到的EDA工具软件名称(必填项):EasyEDA
【作品正式发表(报名成功后进入设计阶段)需要填写的内容】
一、作品简介
随着生活质量的提高和生活节奏的加快,人们愈加需要关注自己的健康状况,本项目意在设计一种基于云平台+APP+设备端的身体参数测试系统,利用脉搏传感器、红外传感器、微弱信号检测电路等实现人体参数的采集,数据通过无线网或其他方式上传云端存储,并提供网页端交互界面,为用户构建一种人体参数管理平台。


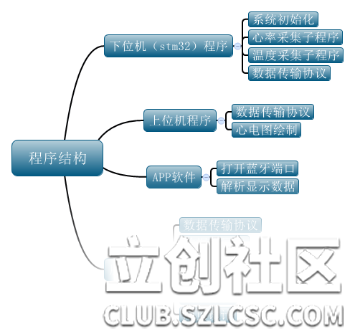
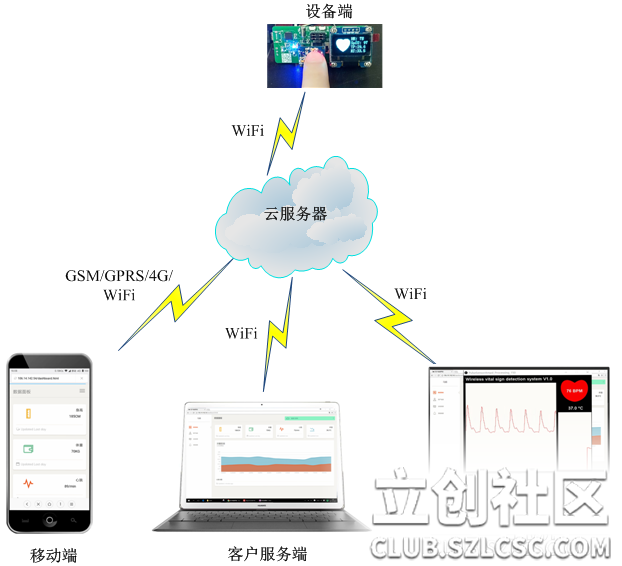
二、系统构架图
系统的硬件部分由MCU、心率传感器、温度传感器、电源、蓝牙模块、WiFi模块构成。软件部分包括基于C语言的stm32程序设计、上位机软件设计、服务器端网页及后台程序设计、APP软件设计。硬件架构和软件架构分别如下图所示。

系统工作时,通过心率传感器和温度传感器分别采集心率和体温的原始AD信号,通过相应算法计算得出心率与温度值,通过WiFi上传到云服务器端。云服务器端对传输的数据进行处理、存储、分析,同时也通过对数据的分析进行预警和提示,用户只需登录到相应网页或手机APP即可查看自己或家人的实时与历史数据,另外本系统也提供了定位功能,用户可在地图上查看测量终端所在的位置。
三、硬件部分的描述
设计软件:立创EDA
设计链接:https://lceda.cn/markone/hehe
原理图:
PCB:

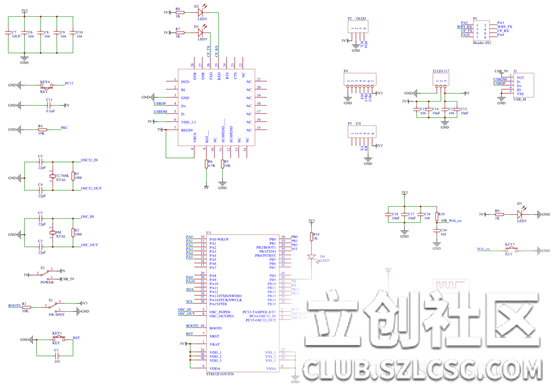
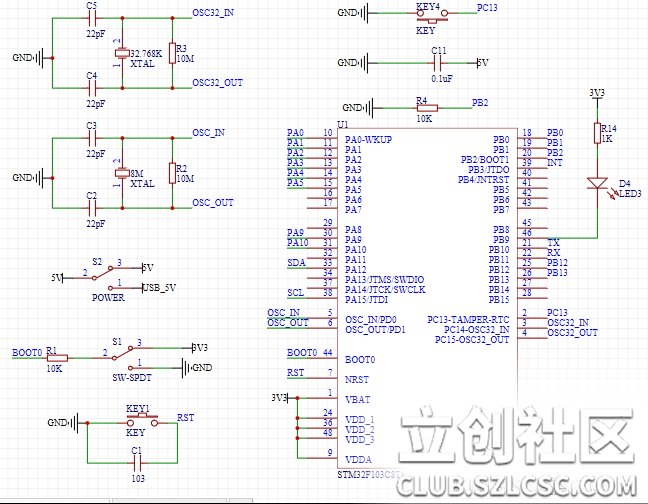
1.MCU系统电路
本系统采用STM32103C8T6,其作为主控芯片一方面对传感器数据进行采集,另一方面将数据通过算法进行处理,并转发到云服务器,因此在电路设计时将两个ADC接口接入传感器。对于STM32系统,其必要组成部分还包括了启动模式选择电路、晶振复位电路等,在设计时还我另外加入了指示灯与按键作为备用。STM32系统电路如图4所示。STM32的供电电压以及心率、温度传感器的电压都是3.3V,因此如果采用5V电压供电则还需要进行电压转换,本系统采用了LDO稳压器LM1117将5V转为3.3V。对于电源和开关的部分,系统采用MICO USB接口进行供电和下载程序,该部分电路如图所示。
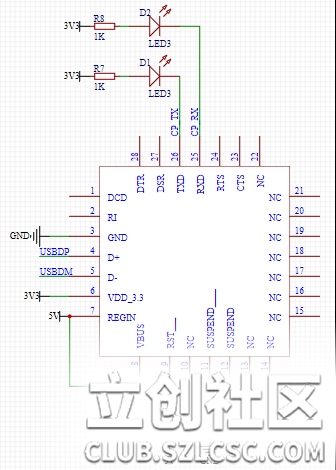
2.USB转串口电路
利用USB作为系统程序下载接口,需要对其电平进行转换才能与STM32的串口进行通信,本系统采用了CP2102作为转换芯片,CP2102集成度高,内置USB2.0全速功能控制器、USB收发器、晶体振荡器、EEPROM及异步串行数据总线(UART),支持调制解调器全功能信号,无需任何外部的USB器件。CP2102与其他USB-UART转接电路的工作原理类似,通过驱动程序将PC的USB口虚拟成COM口以达到扩展的目的。该部分的电路设计图如图所示。
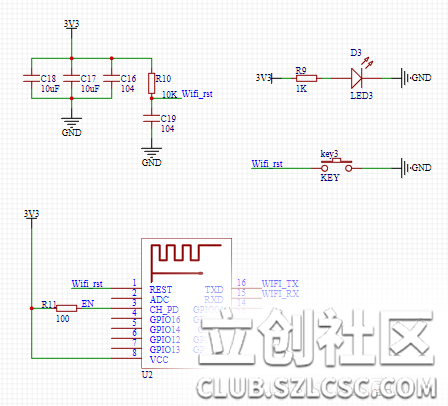
3.WiFi模块
WiFi模块采用了ESP8266模块,当使用该模块时需要设计其外部电路,包括电源电路、复位电路、模式选择电路等部分,设计完成的电路图如图所示。
四、材料清单(BOM列表)

五、软件部分的描述(选填)
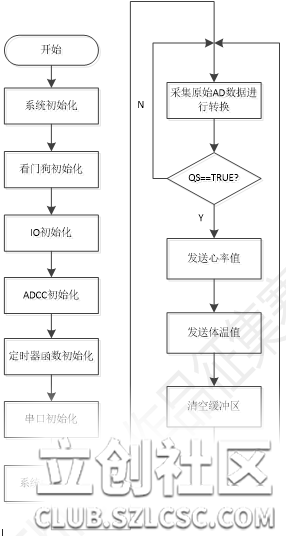
1.主芯片程序设计
STM32的程序设计基于RT-Thread行开发。系统初始化之外,在主程序中,完成如下功能:
1)通过内部AD接口对传感器的AD数据进行采集;
2)将数据通过算法进行处理;
3)将处理好的数据打包提供WiFi模块发送给服务器;
4)喂狗。按照以上4点功能进行设计,程序工作流程图如图所示。
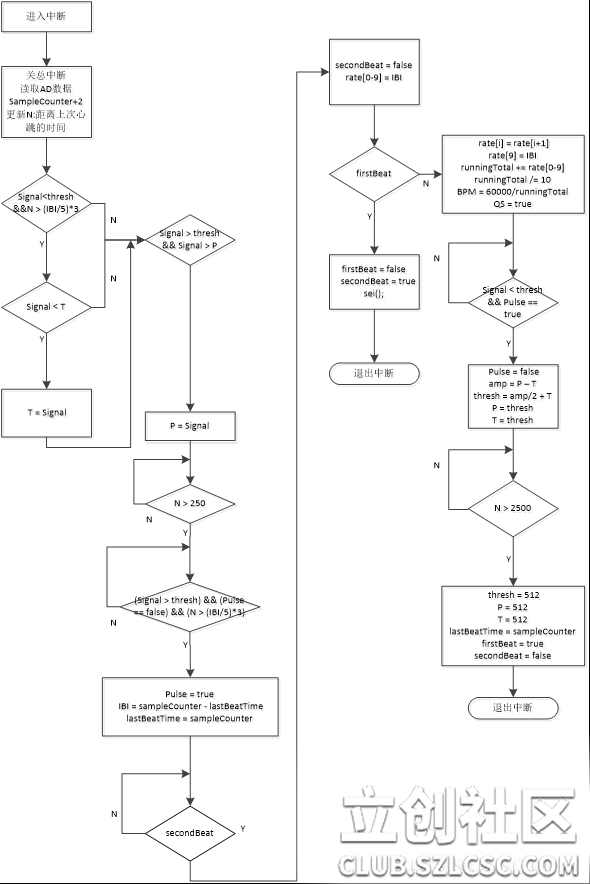
2.心率采集算法
心率采集算法的目标是找到瞬间心跳的连续时刻,并测量两者之间的时间间隔(IBI)。通过遵循PPG波形的可预测的形状和模式,我们能够做到这一点。当心脏将血液泵入人体时,每次搏动都会有一个脉冲波(有点像冲击波)沿着所有的动脉传到脉搏传感器附着的毛细血管组织的末端。实际的血液循环比脉搏波传播慢得多。从下图所示的PPG上的T点开始跟踪事件。当脉搏波在传感器下方通过时,信号值迅速上升,然后信号回落到正常点。有时候,双向切口(向下尖峰)比其他更明显,但通常信号在下一个脉冲波冲洗之前稳定到背景噪声。由于波浪是重复的和可预测的,可以选择几乎任何可识别的特征作为参考点,比如峰值,并通过在每个峰值之间的时间计算心率。然而,这可能会从二分的切口中错误地读取,并且对基线噪声可能也是不准确的。理想情况下,想要找到心脏跳动的瞬间时刻需要准确的BPM计算,心率变异性(HRV)研究和脉搏传递时间(PTT)测量。

通过使用定时器中断,我们的节拍查找算法在后台运行,并自动更新变量值。整体的算法流程图如图所示
3.服务器软件与网页设计
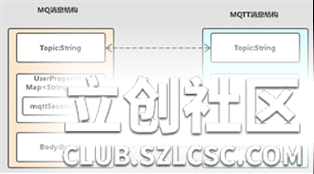
服务器端采用阿里云提供的云服务器,其数据传输协议是MQTT协议,测量采集端作为MQTT的设备端,云服务器作为MQTT的服务端,接收的数据存入SQL并通过网页展示,MQTT协议数据传输流程如图所示。
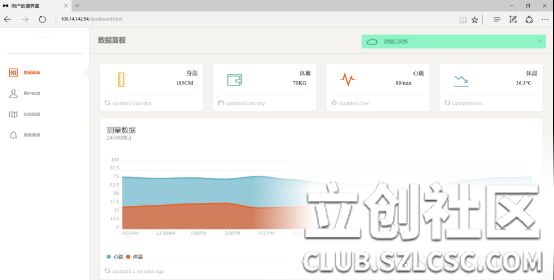
设计完成的主数据界面如下图
4.APP软件设计
移动终端APP第一次打开后进行手动配网,当搜索到指定的WIFI信号时进行连接,随后对TCP端口进行监听,对接受的数据包进行解析,随后将数据显示在屏幕上。设计完成的APP如下图。


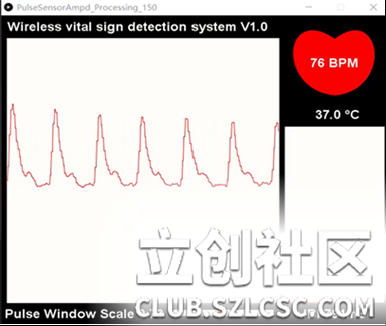
5.上位机软件设计
上位机软件基于JAVA进行设计,通过端口接收测量终端传输的数据包,并进行解析,通过图形形象地展示出心率的实时状态,其工作界面如图所示。
6.RT-Thread移植简介
本部分简单介绍了本系统中使用OLED和WIFI模块所涉及的SPI和串口通信在RTT中的使用过程,对函数的调用过程、关键函数的使用、设备驱动的调用分别进行了一些介绍。
6.1OLED
OLED与芯片的通过SPI协议通信,设备驱动使用流程大致如下:
(1)定义设备对象,调用 rt_spi_bus_attach_device() 挂载设备到SPI总线
此函数用于挂载一个SPI设备到指定的SPI总线,向内核注册SPI设备,并将user_data保存到SPI设备device里。
参数 |
描述 |
device |
SPI设备句柄 |
name |
SPI设备名称 |
bus_name |
SPI总线名称 |
user_data |
用户数据指针 |
a. 首先需要定义好SPI设备对象device
b. SPI总线命名原则为spix, SPI设备命名原则为spixy,本项目的spi10 表示挂载在在 spi1设备。
c. SPI总线名称可以在msh shell输入list_device 命令查看,确定SPI设备要挂载的SPI总线。
d. user_data一般为SPI设备的CS引脚指针,进行数据传输时SPI控制器会操作此引脚进行片选。
本项目的底层驱动 drv_ssd1306.c 中 rt_hw_ssd1306_config() 挂载ssd1306设备到SPI总线源码如下:
static int rt_hw_ssd1306_config(void)
{
rt_err_t res;
/* oled use PC8 as CS */
spi_cs.pin = CS_PIN;
rt_pin_mode(spi_cs.pin, PIN_MODE_OUTPUT); /* 设置片选管脚模式为输出 */
res=rt_spi_bus_attach_device(&spi_dev_ssd1306,SPI_SSD1306_DEVICE_NAME, SPI_BUS_NAME, (void*)&spi_cs);
if (res != RT_EOK)
{
OLED_TRACE("rt_spi_bus_attach_device!\r\n");
return res;
}
}
(2)调用 rt_spi_configure() 配置SPI总线模式。
挂载SPI设备到SPI总线后,为满足不同设备的时钟、数据宽度等要求,通常需要配置SPI模式、频率参数SPI从设备的模式决定主设备的模式,所以SPI主设备的模式必须和从设备一样两者才能正常通讯。
rt_err_t rt_spi_configure(struct rt_spi_device *device, struct rt_spi_configuration *cfg)
参数 |
描述 |
device |
SPI设备句柄 |
cfg |
SPI传输配置参数指针 |
此函数会保存cfg指向的模式参数到device里,当device调用数据传输函数时都会使用此配置信息。
挂载SPI设备到SPI总线后必须使用此函数配置SPI设备的传输参数。
本项目底层驱动 drv_ssd1306.c 中 rt_hw_ssd1306_config() 配置SPI传输参数源码如下:
static int rt_hw_ssd1306_config(void)
{
/* config spi */
{
struct rt_spi_configuration cfg;
cfg.data_width = 8;
cfg.mode = RT_SPI_MASTER | RT_SPI_MODE_0 | RT_SPI_MSB;
cfg.max_hz = 20 * 1000 *1000; /* 20M,SPI max 42MHz,ssd1306 4-wire spi */
rt_spi_configure(&spi_dev_ssd1306, &cfg);
}
(3) 使用 rt_spi_transfer() 等相关数据传输接口传输数据。
SPI设备挂载到SPI总线并配置好相关SPI传输参数后就可以调用RT-Thread提供的一系列SPI设备驱动数据传输函数。
此函数可以传输一连串消息,用户可以很灵活的设置message结构体各参数的数值,从而可以很方便的控制数据传输方式。
(4)通过设备驱动的调用在OLED上显示图像和文字,首先需要确定信息在OLED上的行列起始地址,调用ssd1306_write_cmd() 向SSD1306发送指令,调用 ssd1306_write_data() 向SSD1306发送数据,源代码如下:
void set_column_address(rt_uint8_t start_address, rt_uint8_t end_address)
{
ssd1306_write_cmd(0x15); // Set Column Address
ssd1306_write_data(start_address); // Default => 0x00 (Start Address)
ssd1306_write_data(end_address); // Default => 0x7F (End Address)
}
void set_row_address(rt_uint8_t start_address, rt_uint8_t end_address)
{
ssd1306_write_cmd(0x75); // Set Row Address
ssd1306_write_data(start_address); // Default => 0x00 (Start Address)
ssd1306_write_data(end_address); // Default => 0x7F (End Address)
}
6.2串口
串口用来与WIFI 模块ESP8266进行通信,在串口的使用过程中,主要使用了以下几个函数进行初始化:
static void RCC_Configuration(void)
static void GPIO_Configuration(void)
static void NVIC_Configuration(struct stm32_uart *uart)
void rt_hw_usart_init();
(1)在void rt_hw_usart_init();中对波特率、串口号、字长等进行设置。
实际的路径调用过程如下。
startup.c main()
---> startup.c rtthread_startup()
---> board.c rt_hw_board_init()
---> usart.c rt_hw_usart_init()
(2)为了设备纳入到RTT的IO设备层中,需要为这个设备创建一个名为rt_device的数据结构。该数据结构在rtdef.h中定义。需要一些函数来操作逻辑设备,这些函数在rt-thread/src/device.c文件中提供,它们是:
rt_err_t rt_device_register(rt_device_t dev, const char *name, rt_uint16_t flags)
将rt_device数据结构加入到RTT的设备层中,这个过程称为“注册”。RTT的设备管理层会为这个数据结构创建唯一的device_id。
rt_err_t rt_device_unregister(rt_device_t dev)
与注册相反,自然是注销了,将某个设备从RTT的设备驱动层中移除。
rt_device_t rt_device_find(const char *name)
根据设备的字符串名查找某个设备。
rt_err_t rt_device_init(rt_device_t dev)
通过调用rt_device数据结构中的init函数来初始设备。
rt_err_t rt_device_init_all(void)
初始化RTT设备管理层中的所有已注册的设备
rt_err_t rt_device_open(rt_device_t dev, rt_uint16_t oflag)
通过调用rt_device数据结构中的open函数来打开设备。
rt_err_t rt_device_close(rt_device_t dev)
通过调用rt_device数据结构中的close函数来关闭设备。
rt_size_t rt_device_read(rt_device_t dev, rt_off_t pos, void *buffer, rt_size_t size)
通过调用rt_device数据结构中的read函数来从设备上读取数据。
rt_size_t rt_device_write(rt_device_t dev, rt_off_t pos, const void *buffer, rt_size_t size)
通过调用rt_device数据结构中的write函数来向设备写入数据(比如设备是flash,SD卡等,nand or nor flash等等)。
(3)open,read等函数的编写过程如下。
Ⅰ..init函数完成对设备数据结构的初始化工作。 RTT的设备驱动存在大量的预定义宏,它们在rtdef.h中定义。
Ⅱ.open
因为在usart.c中已经初始usart设备,然后init中通过USART_Cmd语句后,串口就会开始工作。因此open函数设置为空即可
close同colse,之间置空即可
Ⅲ.read
static rt_size_t rt_serial_read (rt_device_t dev, rt_off_t pos, void* buffer, rt_size_t size)
pos表示读写的位置,buffer是用于存储读取到数据的缓冲区。size为字节数目。对于USART这种串行的流设备来说,pos没有意义,因此这里的pos没有意义。 rt_device数据结构dev的的 user_data域存放了(struct stm32_serial_device*)型指针。
Ⅳ.write
向串口写入数据,即发送数据。
/* polling mode */
if (dev->flag & RT_DEVICE_FLAG_STREAM)
{
/* stream mode */
while (size)
{
if (*ptr == '\n')
{
while (!(uart->uart_device->SR & USART_FLAG_TXE));
uart->uart_device->DR = '\r';
/* interrupt mode Tx, does not support */
RT_ASSERT(0);
} while (!(uart->uart_device->SR & USART_FLAG_TXE));
uart->uart_device->DR = (*ptr & 0x1FF); ++ptr; --size;
}
}
else
{
/* write data directly */
while (size)
{
while (!(uart->uart_device->SR & USART_FLAG_TXE));
uart->uart_device->DR = (*ptr & 0x1FF); ++ptr; --size;
}
}
V.注册USART的rt_device结构
rt_err_t rt_hw_serial_register(rt_device_t device, const char* name, rt_uint32_t flag, struct stm32_serial_device *serial)
{
RT_ASSERT(device != RT_NULL); if ((flag & RT_DEVICE_FLAG_DMA_RX) ||
(flag & RT_DEVICE_FLAG_INT_TX))
{
RT_ASSERT(0);
} device->type = RT_Device_Class_Char;
device->rx_indicate = RT_NULL;
device->tx_complete = RT_NULL;
device->init = rt_serial_init;
device->open = rt_serial_open;
device->close = rt_serial_close;
device->read = rt_serial_read;
device->write = rt_serial_write;
device->control = rt_serial_control;
device->user_data = serial; /* register a character device */
return rt_device_register(device, name, RT_DEVICE_FLAG_RDWR | flag);
}
六、作品演示
腾讯视频:http://url.cn/5LXX7JF
七、总结
本作品的设计实现了人体体征参数的实时测量、远程查看、云端存储、分析提示等功能,适用于各种场景,可作为家庭医疗助手、个人医护设备等;相比于传统设备成本低廉、易于携带,云端数据存储的功能既方便又快捷,可以进行长期数据监测,并进行健康数据分析。同时系统的兼容性十分强,对于其他智能设备,均可快速接入云服务;对于测量终端,可增加其他体征测量设备作为辅助参考依据。同时系统具有很多改进和升级的空间,如可以增加锂电池及其充放电电路实现自带供电系统,相信在今后的使用中会发现更多的不足,我将继续完善!




 返回列表
返回列表


 发表于2018-05-18 09:28:29
发表于2018-05-18 09:28:29



 回复
回复
 收藏
收藏
 举报
举报


