【报名阶段需要填写的内容】
1. 参赛者姓名(必填项):张博文
2. 单位或学校名称(选填项):华南农业大学
3. 当前职务或职称(选填项):学生
4. 参赛作品的名字(必填项):基于dsp6748车牌识别系统
5. 简要陈述您的idea和作品(必填项):通过dsp控制摄像头拍照车牌,并传回dsp芯片处理,通过算法识别出车牌号码,并显示到计算机和LCD
6. 拟用到的立创商城在售物料(必填项):杜邦线,电阻电容若干,串口线
7. 拟用到的非立创商城物料或其它补充(必填项):dsp开发板
8. 拟用到的EDA工具软件名称(必填项):立创EDA,AD
【作品正式发表(报名成功后进入设计阶段)需要填写的内容】
一、作品简介
例如,可以包括但不局限于以下内容:
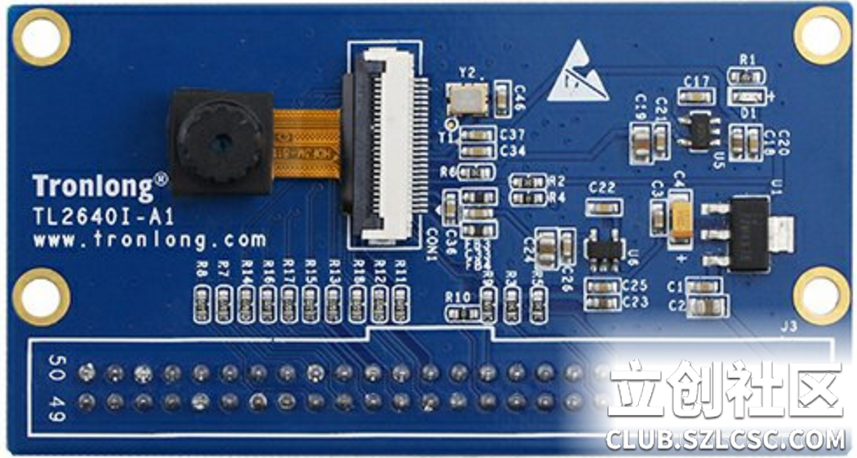
1.作品的整机外观图片或焊接组装好的PCBA图片;


2.作品的研究背景、目的和功能、市场应用前景;
智能交通系统(ITS)是未来交通发展的必然趋势,是目前电子信息技术的交通运输
领域应用的前沿研究项目。车牌识别(License plate recognition system ,LRPS)是
智能交通系统的重要组成部分,在规范交通管理以及减少交通事故等方面具有重要的
现实意义。
3.作品在创新性、趣味性、实用性甚至公益性方面,有哪些亮点可体现?
利用嵌入式dsp技术dsp技术实现车牌识别。与以往基于PC的车牌识别系统不同,本识别系统可将
图像算法固化在dsp芯片上,形成专用的图像处理硬件模块,具有识别速度快,系统结构简单,方便携带
,成本低,体积小优点。并且运用了一种综合车牌纹理,形状,颜色特征的定位方法和基于Radon 变换和
模板匹配的方法。
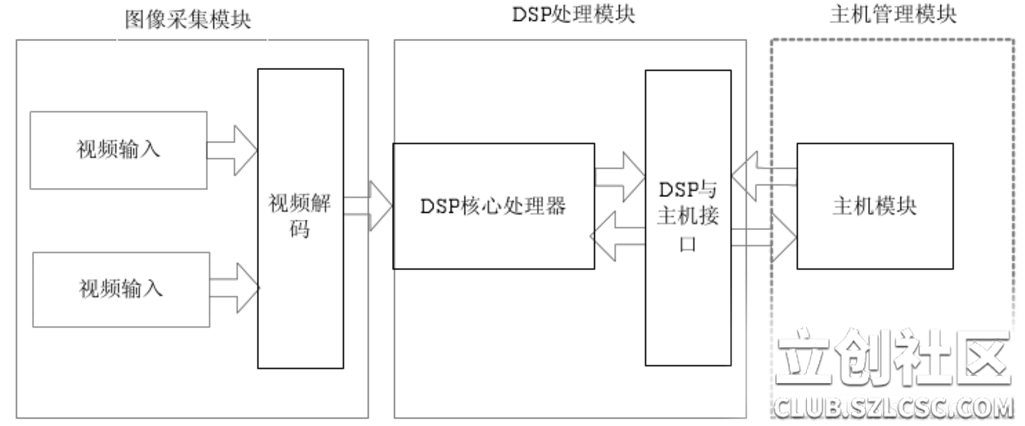
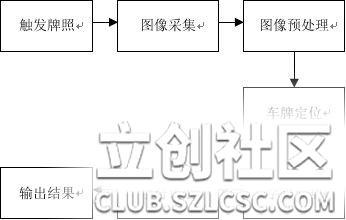
二、系统构架图
用流程图或思维导图等形式,描述您的作品的组成构架,即方案图。
三、硬件部分的描述
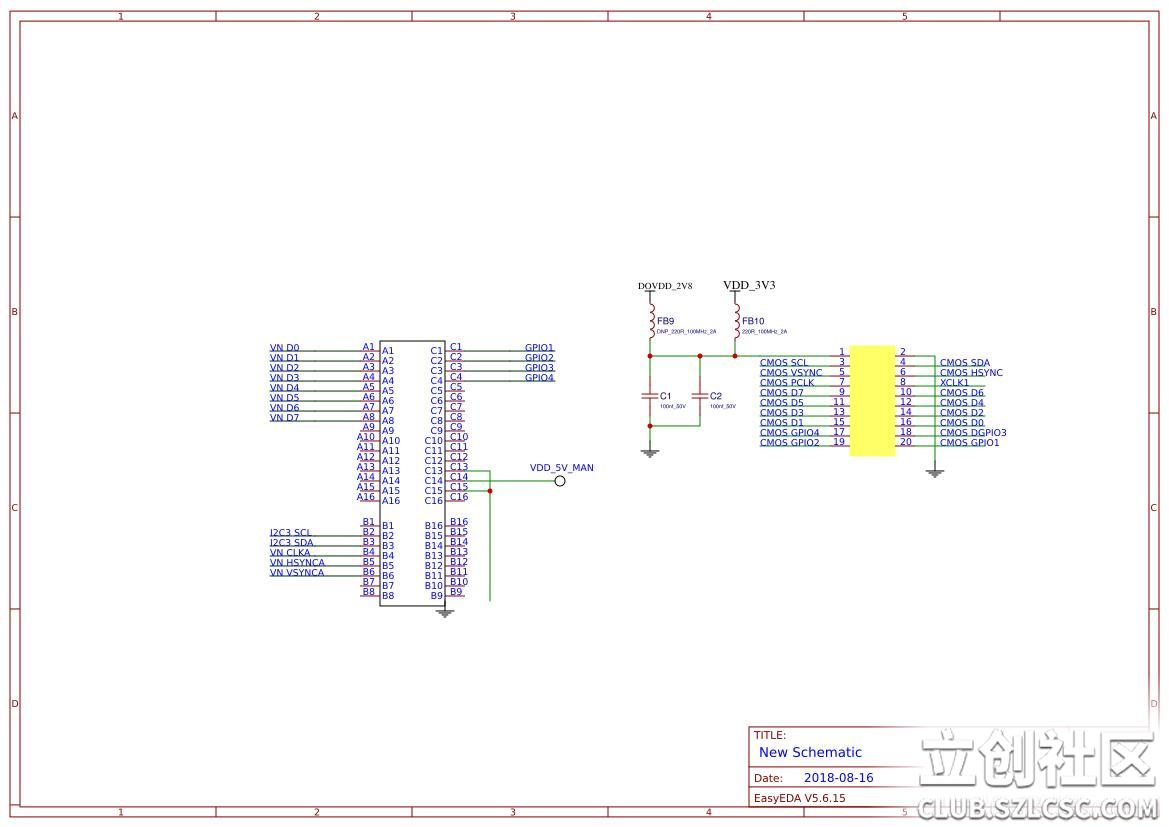
1.附上原理图&PCB实物图的图片或者源文件(官方建议大家尽量用源文件上传),如果是图片,请确保图片是清晰可辨的;
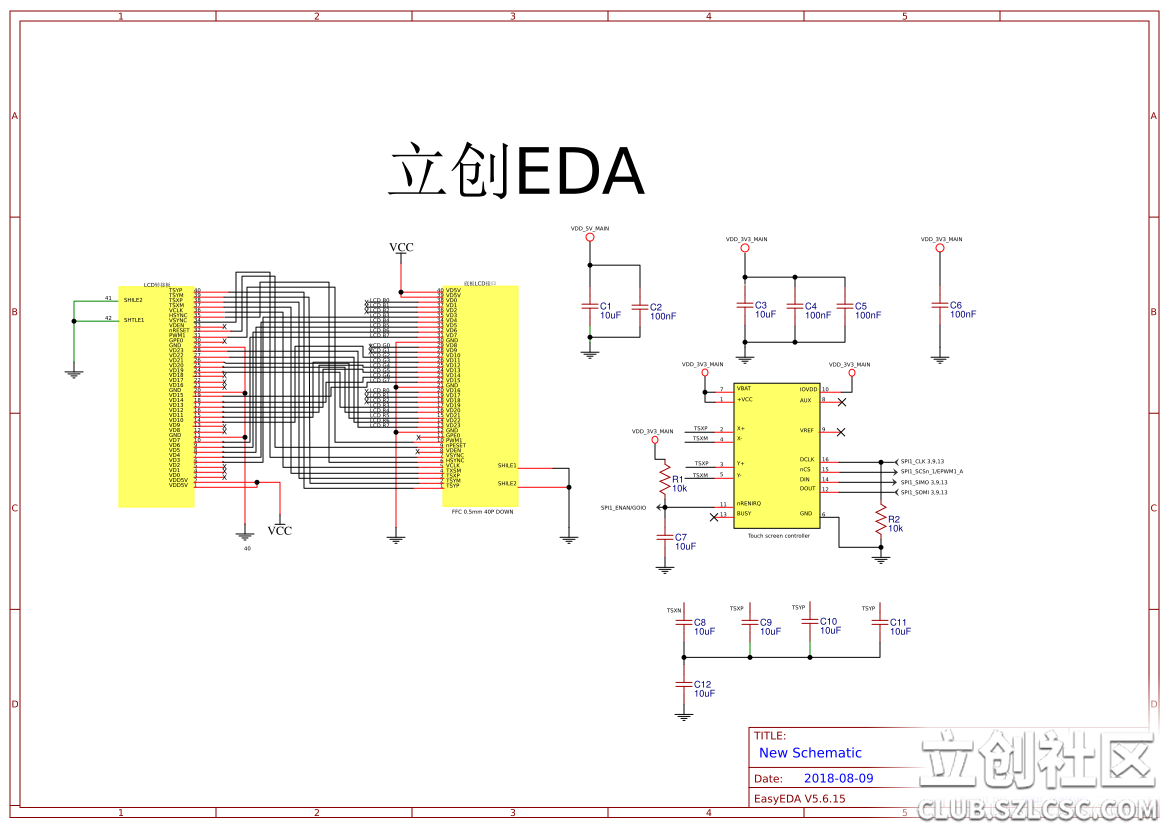
LCD_eaysEDA源码.zip
底板pcd.zip
VPORT.rar
2.用文字把该作品的实现原理、系统的工作过程大致讲解一下。
DSP芯片驱动摄像头和LCD显示屏工作,摄像头采集图像数据到dsp芯片,dsp芯片对图像进行处理并识别,把识别结果传给LCD屏幕和PC
3.注明所用到的EDA工具软件名称并附上设计链接。
https://lceda.cn/editor#id=|84a36e9f976e4f7f8b663105f8a5b92b
https://lceda.cn/editor#id=|137b1ba9035741398c83418830f02395
四、材料清单(BOM列表)
DSP芯片,开发板底板,7寸LCD屏幕,OV2640摄像头,摄像头转接器,LCD转接器等
五、软件部分的描述(选填)
如果您的作品涉及到软件,请列出作品对应的软件工作流程图,及关键部分的例程、源码(如果您想开源的话请上传全部源码)。
其中预处理部分包含纹理和颜色过滤等步骤。
***************************************************
//颜色过滤
void getblue(const unsigned char *in, unsigned char *out)
{
int i,j,r,g,b;
unsigned short hang,lie;
unsigned short temp;
//获取宽度和高度
hang = (in[2]<<8) + in[1];
lie = (in[4]<<8) + in[3];
//复制像头
*out++ = *in++;
*out++ = *in++;
*out++ = *in++;
*out++ = *in++;
*out++ = *in++;
for(i=0; i<lie; i++)
for(j=0; j<hang; j++)
{ //求出RGB565的分量
r = (in[(i*hang + j)*2 + 1] >> 3) & 0x1f;
g = ((in[(i*hang + j)*2 + 1] & 0x7) << 3) | ((in[(i*hang + j)*2]>>5) & 0x7);
b = (in[(i*hang + j)*2]) & 0x1f;
if( (r<=20)&&(g<=40)&&(b>= 21 //设置阈值,对非车牌区域过滤
{
temp=0;
}
else
{
temp=255;
}
*out++ = temp;
}
}
***************************************************************
//灰度变换
void GreyTran(const unsigned char *in, unsigned char *out)
{
int i,j,r,g,b;
unsigned short hang,lie;
unsigned short temp;
hang = (in[2]<<8) + in[1];
lie = (in[4]<<8) + in[3];
*out++ = *in++;
*out++ = *in++;
*out++ = *in++;
*out++ = *in++;
*out++ = *in++;
for(i=0; i<lie; i++)
for(j=0; j<hang; j++)
{
r = (in[(i*hang + j)*2 + 1] >> 3) & 0x1f;
g = ((in[(i*hang + j)*2 + 1] & 0x7) << 3) | ((in[(i*hang + j)*2]>>5) & 0x7);
b = (in[(i*hang + j)*2]) & 0x1f;
r = r<<3;
g = g<<2;
b = b<<3;
temp = (r*299 + g*587 + b*114 + 500) / 1000;
if(temp >255)
{
temp = 255;
UARTprintf("grey=%x\n",*(out-1));
}
*out++ = temp;
}
}
****************************************************
//根据得出的4个边界计算车牌图像
void getcarplateimage(unsigned char *SourceImage,unsigned int left,
unsigned int right, unsigned int up, unsigned int down)
{
int i,j;
for(i=0;i<up*2;i++)
{
for(j=0;j<800*2;j++)
SourceImage[ i*800+j] =0;
// SourceImage[5 + (i*800+j)*2+1] =0;
}
for(i=479*2;i>down*2;i--)
{
for(j=0;j<800*2;j++)
SourceImage[i*800+j] =0;
}
for(j=0;j<left*2;j++)
{
for(i=0;i<479;i++)
SourceImage[i*800*2+j] =0;
}
for(j=799*2+1;j>right*2;j--)
{
for(i=0;i<479;i++)
SourceImage[ i*800*2+j] =0;
}
}
*****************************************************
// 初始化离屏显存
GrOffScreen16BPPInit(&g_sTL_LCD_16BitDisplay, g_pucBuffer, LCD_WIDTH, LCD_HEIGHT);
// 初始化显存上下文.
GrContextInit(&sContext, &g_sTL_LCD_16BitDisplay);
// 使能LCD帧结束中断
RasterEndOfFrameIntEnable(SOC_LCDC_0_REGS);
// 使能光栅
RasterEnable(SOC_LCDC_0_REGS);
ConfigRasterDisplayEnable();
}
static void SetUpLCD(void)
{
unsigned int val;
volatile unsigned int savePinMux = 0;
PSCModuleControl(SOC_PSC_1_REGS, HW_PSC_LCDC, PSC_POWERDOMAIN_ALWAYS_ON,
PSC_MDCTL_NEXT_ENABLE);
LCDPinMuxSetup();
// 背光
GPIODirModeSet(SOC_GPIO_0_REGS, 8, GPIO_DIR_OUTPUT);
GPIOPinWrite(SOC_GPIO_0_REGS, 8, GPIO_PIN_HIGH);
// 禁用光栅
RasterDisable(SOC_LCDC_0_REGS);
// 时钟配置
RasterClkConfig(SOC_LCDC_0_REGS, LCDCLK, LCD_CLK);
// 配置 LCD DMA 控制器
RasterDMAConfig(SOC_LCDC_0_REGS, RASTER_DOUBLE_FRAME_BUFFER,
RASTER_BURST_SIZE_16, RASTER_FIFO_THRESHOLD_8,
RASTER_BIG_ENDIAN_DISABLE);
// 模式配置(例如:TFT 或者 STN,彩色或者黑白 等等)
RasterModeConfig(SOC_LCDC_0_REGS, RASTER_DISPLAY_MODE_TFT,
RASTER_PALETTE_DATA, RASTER_COLOR, RASTER_RIGHT_ALIGNED);
// 帧缓存数据以 LSB 方式排列
RasterLSBDataOrderSelect(SOC_LCDC_0_REGS);
// 禁用 Nibble 模式
RasterNibbleModeDisable(SOC_LCDC_0_REGS);
// 配置光栅控制器极性
RasterTiming2Configure(SOC_LCDC_0_REGS, RASTER_FRAME_CLOCK_LOW |
RASTER_LINE_CLOCK_LOW |
RASTER_PIXEL_CLOCK_HIGH|
RASTER_SYNC_EDGE_RISING|
RASTER_SYNC_CTRL_ACTIVE|
RASTER_AC_BIAS_HIGH , 0, 255);
// 配置水平 / 垂直参数
RasterHparamConfig(SOC_LCDC_0_REGS, LCD_WIDTH, HSW, HFP, HBP);
RasterVparamConfig(SOC_LCDC_0_REGS, LCD_HEIGHT, VSW, VFP, VBP);
// 配置 FIFO DMA 延时
RasterFIFODMADelayConfig(SOC_LCDC_0_REGS, (17647058/8823529));
// 修改优先级
val = HWREG(0x01C14118);
val &= 0x0fffffff;
HWREG(0x01C14118) = val;
}
六、作品演示
请上传您的作品的功能演示到腾讯视频,并编辑到本楼(或附上视频链接)。按要求上传视频可获得10分,具体详见活动规则。
https://v.qq.com/x/page/x0762oewapz.html
七、总结
例如您在完成该作品过程中的一些体会、碰到的技术问题或调试经验、作品的未来规划,及对我们主办方的建议和意见等。
作品识别误差率主要受外界光线强度的干扰,如果有自动补光系统识别率可以更高。 最后感谢立创公司给予我们这次大显身手的机会谢谢啦




 返回列表
返回列表


 发表于2018-06-20 22:31:14
发表于2018-06-20 22:31:14



 回复
回复
 收藏
收藏
 举报
举报



