电子和生活产品结合,可以实现避障、测距。做这个项目的经验,可分为四步。
第1步:根据实际情况确定智能小车所需要实现的功能。例如:测距、避障检测边缘……;
第2步:根据智能小车所需要实现的功能确定相应的硬件部分。如寻线是用红外还是用激光……、测距是用超声波还是激光……、避障是用红外还是超声波……寻找物体使用红外还是超声波还是雷达还是其他的等等。选取方案的时候既要考虑实际效果还要根据自身能力判断……不要到时候进退两难;
第3步:编写程序。
第4步:实验,并找出漏洞优化程序。
当然在此之前,还有一件很重要的事要做就是选取什么单片机。 下面是源程序:
#include <REGX52.H> //包含51单片机相关的头文件 sbit LeftIR=P1^1; //定义前方左侧红外探头端口 sbit RightIR=P1^0; //定义前方右侧红外探头端口 sbit bizhangLED=P2^0; //定义前方右侧红外探头端口 sbit M1A=P0^0; //定义左侧电机驱动A端 sbit M1B=P0^1; //定义左侧电机驱动B端 sbit M2A=P0^2; //定义右侧电机驱动A端 sbit M2B=P0^3; //定义右侧电机驱动B端 void tingzhi() { M1A=0; //将M1电机A端初始化为0 M1B=0; //将M1电机B端初始化为0 M2A=0; //将M2电机A端初始化为0 M2B=0; } void qianjin() { M1A=1; M1B=0; M2A=1; M2B=0; } void houtui() { M1A=0; M1B=1; M2A=0; M2B=1; } void zuozhuan() { M1A=1; M1B=0; M2A=0; M2B=1; } void youzhuan() { M1A=0; M1B=1; M2A=1; M2B=0; } void delay_nus(unsigned int i) //延时:i>=12 ,i的最小延时单12 us { i=i/10; while(--i); } void delay_nms(unsigned int n) //延时n ms { n=n+1; while(--n) delay_nus(900); //延时 1ms,同时进行补偿 } void ControlCar(unsigned char ConType) //定义电机控制子程序 { tingzhi(); switch(ConType) //判断用户设定电机形式 { case 1: //前进 //判断用户是否选择形式1 { qianjin(); break; } case 2: //后退 //判断用户是否选择形式2 { houtui(); //M2电机反转 break; } case 3: //左转 //判断用户是否选择形式3 { zuozhuan(); //M2电机正转 break; } case 4: //右转 //判断用户是否选择形式4 { youzhuan(); //M1电机正转 //M2电机反转 break; } case 8: //停止 //判断用户是否选择形式8 { tingzhi(); break; //退出当前选择 } } } void main() //主程序入口 { bit RunFlag=0; //定义小车运行标志位 //RunShow=0; //初始化显示状态 ControlCar(8); //初始化小车运行状态 while(1) //程序主循环 { Start: bizhangLED = 0; if( LeftIR == 0 && RightIR == 1 ) //如果前面避障传感器检测到障碍物 { ControlCar(8); //停止 delay_nms (300); //停止300MS 防止电机反相电压冲击 导致系统复位 ControlCar(4); //后退 delay_nms (260); goto NextRun; } if( LeftIR == 1 && RightIR == 0 ) //如果前面避障传感器检测到障碍物 { ControlCar(8); //停止 delay_nms (300); //停止300MS 防止电机反相电压冲击 导致系统复位 ControlCar(3); //后退 delay_nms (260); goto NextRun; } if( LeftIR == 0 && RightIR == 0 ) //如果前面避障传感器检测到障碍物 { ControlCar(8); //停止 delay_nms (300); //停止300MS 防止电机反相电压冲击 导致系统复位 ControlCar(2); //后退 delay_nms (1000); //后退1500MS ControlCar(3); // delay_nms (1800); goto NextRun; } if( LeftIR == 1 && RightIR == 1 ) { ControlCar(1); //右侧没有信号时,开始向左转一定的角度 delay_nms (10); goto NextRun; } goto Start; NextRun: ControlCar(1); } }
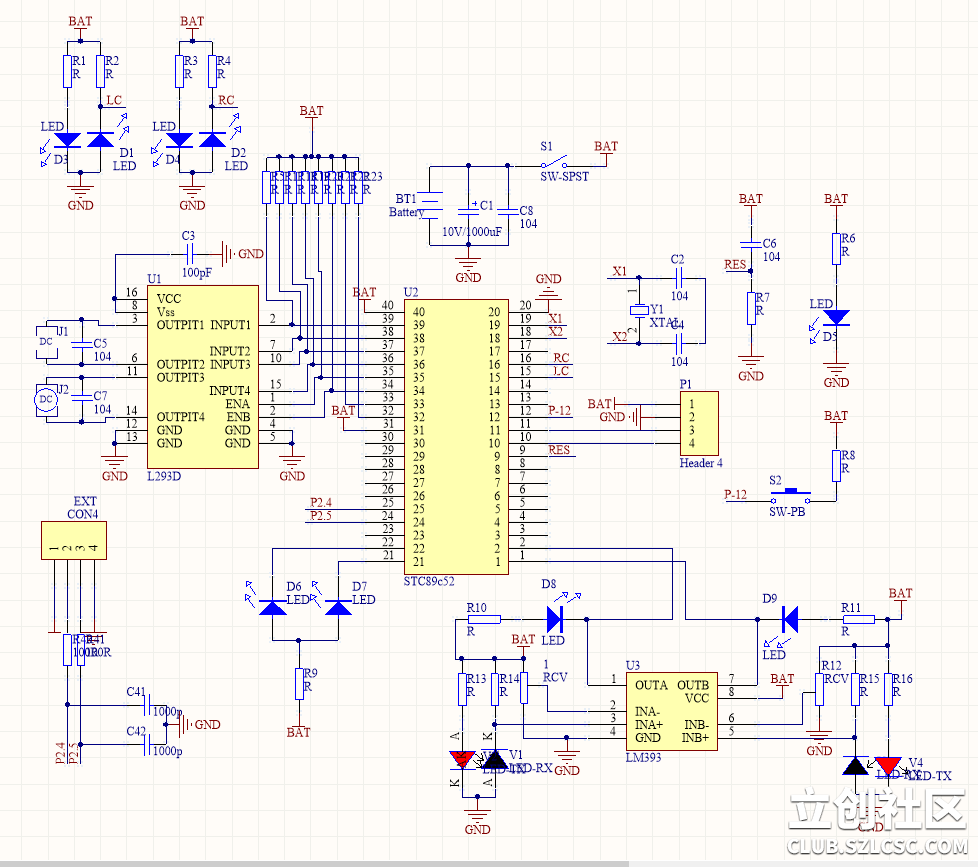
这是原理图




 返回列表
返回列表


 发表于2018-11-28 12:22:15
发表于2018-11-28 12:22:15






 回复
回复
 收藏
收藏
 举报
举报