多路舵机测试平台
一、方案简介
介绍方案之前先来介绍一下什么是舵机及舵机的控制原理:
1、什么是舵机
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。
2、舵机的控制原理
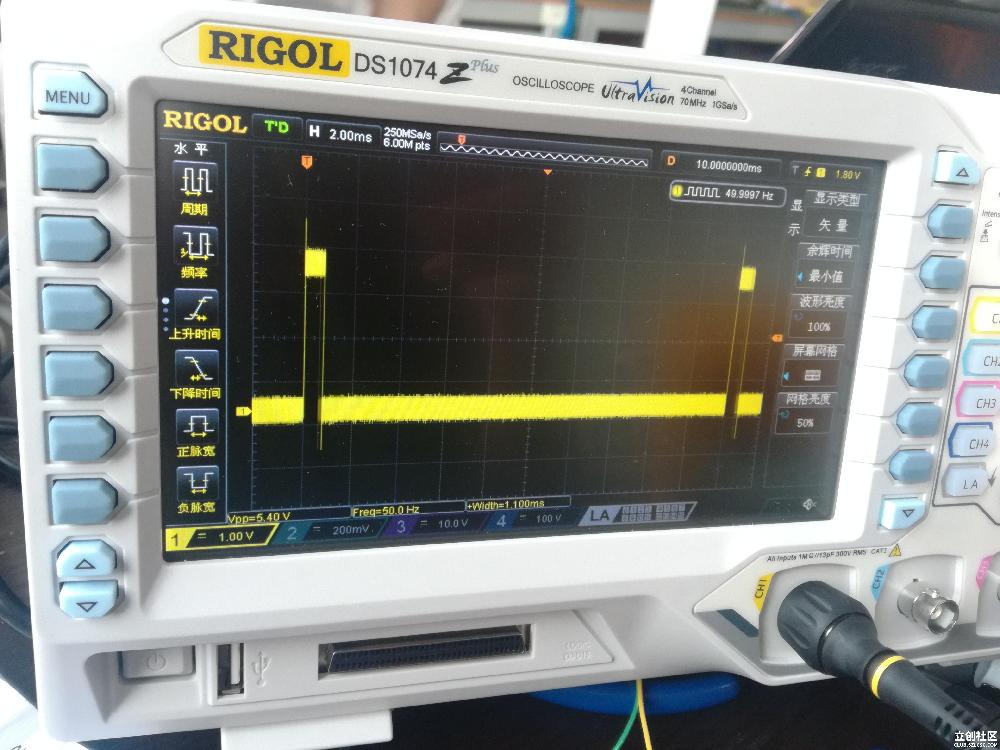
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的: 0.5ms----------- 0度 1.0ms----------- 45度 1.5ms----------- 90度 2.0ms-----------135度 2.5ms-----------180度
舵机上有三根线,分别为VCC、GND、信号线。小型的舵机工作电压一般为4.8~6V,大功率的舵机有的为12V或24V。信号线的控制不需要另外接驱动模块,直接用单片机的管脚控制就行了。控制信号一般要求周期为20ms的PWM信号。
3、方案简介
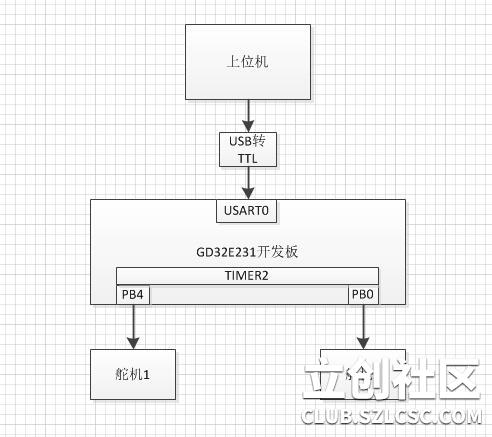
本方案基于GD32E231C8T6,ARMCortex-M23内核的MCU为主控,制作一个多路舵机测试系统,通过单片机timer2输出两路PWM信号驱动SG90型号舵机,并通过USART0与USB转TTL模块与上位机进行通讯,在上位机界面可以方便的设置每通道舵机的旋转角度,并能自动或手动测试每一通道舵机的好坏。
二、GD32 MCU产品介绍
GD32E231 MCU主要规格参数:
Cortex-M23内核 32-bit处理器主频高达72MHz
Flash:64KB
SRAM:8KB
ADC:12-bit
OP-AMP:两路
16位通用定时器:5个
基础定时器:1个
PWM高级定时器:1个
SPI:两路
I2C:两路
USART:两路
I2S:一路
操作电压:1.8V~3.6V
温度范围:-40~85℃
三、方案介绍+方案系统框图
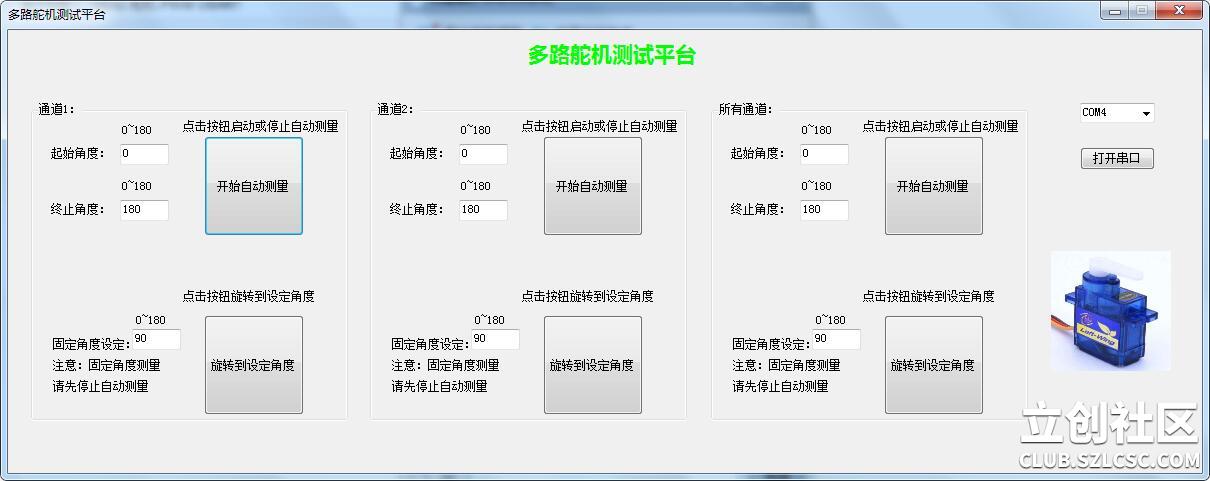
本方案分上位机开发和下位机单片机编程两部分,上位机用C#开发,主要是界面部分和对应功能的实现,下位机主要是接收上位机下发的指令来执行相应的动作,大体流程是通过上位机发送相应指令给GD32E231,GDE231接收到相应指令后并解码成功,由Timer2产生两路PWM信号,两路PWM信号输出至PB4和PB0脚来驱动两路舵机,本实验采用的是SG90型号的舵机,也可换用其他型号舵机进行测试。
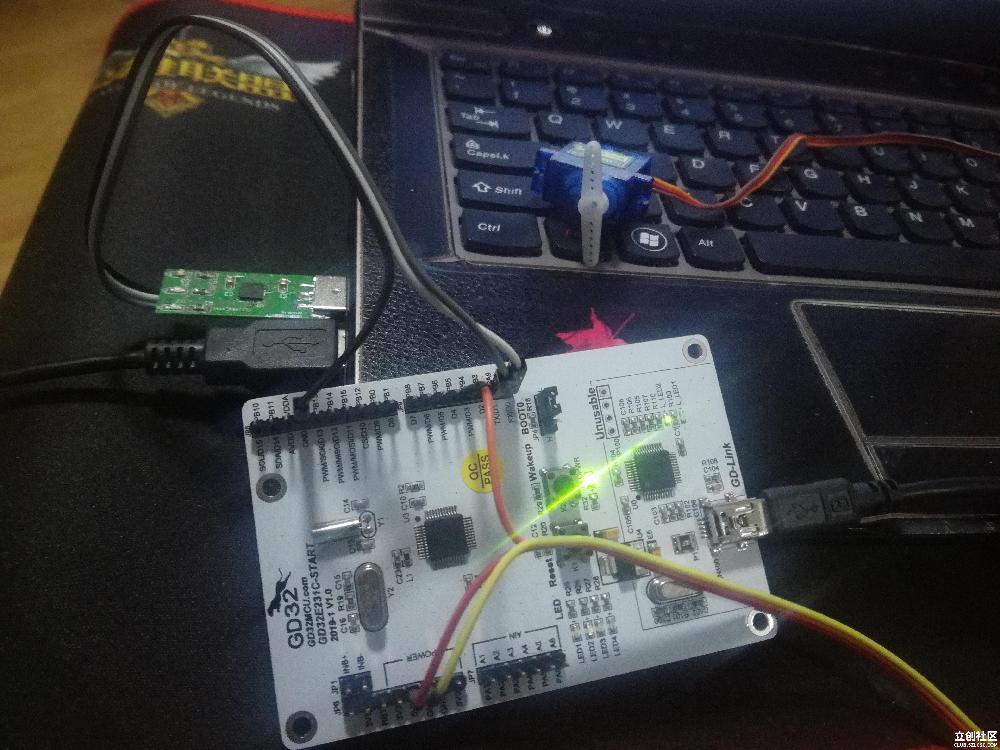
四、照片实力和功能的实现
五、代码分享
PWM多路舵机控制.rar 上位机多路舵机测试平台.rar
GD-Link_ProgrammerGD我用这个软件无法连接上。
我用的串口工具是:Pl2303这个usb转串口。GigaDevice_MCU_ISP_Programmer程序能连接上开发板。用FlyMcu无法连接上。




 返回列表
返回列表




 发表于2019-05-16 22:39:58
发表于2019-05-16 22:39:58




 回复
回复
 收藏
收藏
 举报
举报

