【报名阶段需要填写的内容】
1. 参赛者姓名(必填项):徐景圣
2. 单位或学校名称(必填项):南京市艾瑞职业培训学校
3. 当前职务或职称(必填项):JAVA讲师
4. 参赛作品的名字(必填项):STM32解三阶魔方机器人
5. 简要陈述您的idea和作品(必填项):1)利用丝杆,螺母,舵机,或其它3d打印件构成机械传动装置;2)解魔方算法由单独模块提供服务;android应用负责采集魔方所有色块颜色,并调用相关模块解算魔方,向stm32和控制模块发送解算结果。3)stm32为核心,蓝牙通讯,舵机控制等实现通讯和控制功能;
6. 拟用到的立创商城在售物料(必填项):STM32F103C8T6
7. 拟用到的非立创商城物料或其它补充(必填项):舵机,舵机控制板,纯铜丝杆,各型螺母,垫片,螺帽,蓝牙模块,3d打印件。
【作品正式发表(报名成功后进入设计阶段)需要填写的内容】
一、作品简介
例如,可以包括但不局限于以下内容:
1.作品的整机外观图片或焊接组装好的PCBA图片;
2.作品的研究背景、目的和功能、市场应用前景;
3.作品在创新性、趣味性、实用性甚至公益性方面,有哪些亮点可体现?
大家好,还记得《天龙八部》吗?我最佩服鸠摩智。在学习态度上,他是我的偶像:勤奋好学,武功高绝。
以后每年我都要参加设计大赛,这是我的心愿,直到老了...做不动了!
本次我要打造一个与众不同的解魔方机器人,首先从机械传动结构上,要求简洁适用,颜值超高,便于装缷,不落俗套。
1. 外形篇
我的思路是采用黄铜丝杆加连接件来实现整体外框,大量使用3D打印技术,制作独有的,美观实用的零部件来组成机器人的外型,包括传动结构。
以下是我采购和自行设计的部件:

黄铜丝杆
采用Simense UG NX11设计制作的连接件

下面是采用3D打印技术,打印出来的部件

上图是采用FDM工艺,PLA材料打印的专用舵机座,但是收到货后,对FDM工艺相当失望,看来便宜没好货,确是真理!
M5的螺丝孔塌陷成M4都不到了,整体变形比较严重,无法使用。今天使用光固化工艺重新打印。
光固化工艺做的树脂材料件已到,见下图

最新改版升组的舵机座,准备用铝合金打印,要价220一个,4个要800多块,得拿了奖才能打得起 ,先放着,有空再搞。
,先放着,有空再搞。

丝杆固定平台+舵机座


垂直丝杆联接螺母
上面是用SLA工艺,光敏树脂打印的,效果相当完美,一次成功,螺丝和内螺纹紧密配合,十分满意,不知道大尺寸的物件,会不会有形变,期待舵机座的结论。
[已有结论:大件在施加一定重量后,放一段时间,会变形,受力越大,时间越久,形变也越大;用紫外线加固,效果好些]

8只大小不同的铜齿舵机
把丝杆,连接螺母,舵机座,舵机装配起来了,见下图,还是非常简洁的。


根据水平和垂直舵机组的间距,计算出机械手的长度,用ug设计出的舵盘支架和机械手装配图

舵机盘和机械手设计图


舵机盘和机械手3D打印件

装配好后,看得出,机械臂强度不够,可能是太轻了,每个2g左右。需要加强,得更换方案,在成本和可用性之间取得平衡。

加固后的舵盘架,用SLS工艺,尼龙材料打印两只,每个重约7G,计划放置在水平方向上。用SLA工艺树脂材料打印另外两个,计划放置在竖直方向上,使得成本和可用性取得最大的平衡。
重新设计的机械手


[07-02] 未来工厂发回的尼龙打印件,两小件,加上邮费,一百多块,真是相当的贵呀!心疼。但是人家这个算是良心价了。全网也就他家给打印!而且发货非常正规,感觉很棒!尼龙件拿到手感觉非常扎实,很硬,不是那种一扳就弯的感觉,视觉和触觉上像雪花糕,过年吃的那种点心。

收到的铸造树脂舵盘架,很硬,但太脆。由于我设计未留余量,且铸造树脂的打印精度也不是那么理想,导致装配时相当的紧,一用力就断了。看来还是要用尼龙,贵有贵的道理。不过四个树脂机械手,应该可以使用。

组装好的四支机械手,白色的部分全部采用SLS工艺尼龙材料,仅打印这些尼龙件已经花费200元以上。本作品的3D打印总成本在300元以上。为了得到好的效果可谓不惜重金了。

这段时间,对3D打印了解了一些,在此简单总结一下:
FDM技术,最便宜,约0.5元/ml,需要支撑,材料以PLA为主,成本低,环保,但强度,韧性,稳定性不够,做外形展示可以,比如打印一个雕像。
SLA技术,稍贵,约2元/ml,别人帮我做时,没提需要支撑,材料以光敏树脂为主,成本稍高,环保,性能较好,可以应用于要求更高的场合。
SLS技术,粉末烧结,这里拿尼龙来说(金属太贵,不说了),约6元/ml, 不需支撑,成本高,机械性能好,能做螺钉,螺母。
另外,树脂中有一种8100韧性树脂,3mm厚时已经非常坚固,对比1.5mm厚的尼龙,感觉厚实多了,1.5mm厚的尼龙感觉太柔弱了。
目前我只涉及到这三种,其它的暂时不了解,也不太适合我。
[08-10] 这些天又发现两个问题:一是这个结构还是不稳定,包括尼龙件,时间长了,多少会有形变,非常懊恼。二是之前买的舵机,没有经验,十几块钱一个的MG996R,测试过程中发现回中误差太大,精度太低,而且慢,0.16S/60deg, 几乎用不起来,就半价在闲鱼甩掉了,重新花79块钱一个,买了4个金属数字舵机,老板说是新品推销,不然得是这价的两倍以上。感觉玩机器人也很烧钱哪!
又经过好几天时间,把结构加固调整了一下,主要是用了两块亚克力板来固定舵机,效果个人比较满意。后面不忙了再想办法把机械手部件加固。

[08-14] 代码调试中

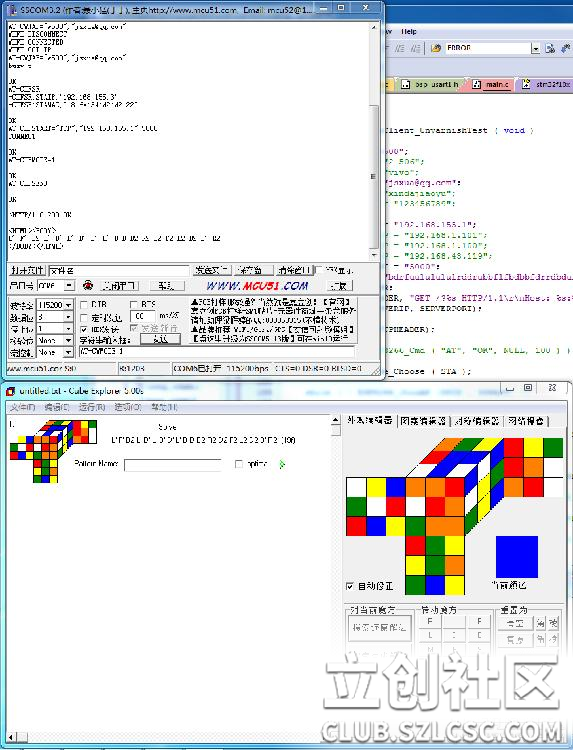
[08-18] 重大突破,解魔方算法已生成,并通过无线网络下发到STM32单片机
二、系统构架图
用流程图或思维导图等形式,描述您的作品的组成构架,即方案图。
三、硬件部分的描述
1.附上原理图&PCB实物图的图片或者源文件(官方建议大家尽量用源文件上传),如果是图片,请确保图片是清晰可辨的;
2.用文字把该作品的实现原理、系统的工作过程大致讲解一下。
四、材料清单(BOM列表)
列出您这个作品所用到的主要器件(关键器件即可),比如单片机&ARM芯片、专用集成芯片(ASIC)、传感器、功能模块等。
如果所列出的芯片是来自我们立创商城上的,最好能写出该器件的商品编号或附上对应购买链接。
五、软件部分的描述(选填)
如果您的作品涉及到软件,请列出作品对应的软件工作流程图,及关键部分的例程、源码(如果您想开源的话请上传全部源码)。
六、作品演示
请上传您的作品的功能演示到腾讯视频,并编辑到本楼(或附上视频链接)。按要求上传视频可获得5分,具体详见活动规则。
七、总结
例如您在完成该作品过程中的一些体会、碰到的技术问题或调试经验、作品的未来规划,及对我们主办方的建议和意见等。




 返回列表
返回列表


 发表于2017-05-24 11:06:25
发表于2017-05-24 11:06:25



 回复
回复
 收藏
收藏
 举报
举报

