【报名阶段需要填写的内容】
1. 参赛者姓名(必填项):罗寓文,袁媛
2. 单位或学校名称(必填项):西南科技大学
3. 当前职务或职称(必填项):大二学生(本科)
4. 参赛作品的名字(必填项):基于STM32四轴飞行器设计
5. 简要陈述您的idea和作品(必填项):设计一款基于STM32四轴飞行器,设计四轴飞行器包括IMU姿态解算,自稳控制,定高自动控制等,达到给他人进行稳定二次开发的目的,降低学习无人机门槛,提高无人机在国内的影响力度,让更多的人认识了解无人机学习无人机。
6. 拟用到的立创商城在售物料(必填项):STM32F407VGT6,ICM20602,HMC5983,MS5611,0603电阻,0603电容,TPS5430,15uH功率电感。
7. 拟用到的非立创商城物料或其它补充(必填项):自备
【作品正式发表(报名成功后进入设计阶段)需要填写的内容】
一、作品简介
1. 
2.我在具备10个月的嵌入式学习经历后,在学校实验室行进制作此版飞控,在传统飞控上,我设计了利用硅胶球连接上下层PCB的方式来实现传感器减震的功能,有效降低了飞机振动对传感器数据产生的噪声。
2.可以继续利用研发的无人机进行二次开发的利用。比如无人机运载货物,无人机农业。无人机观察。
3.四轴飞行器具备VTOL(Vertical Take-Off and Landing,垂直起降)飞行器的所有优点,又具备无人机的造价低、可重复性强以及事故代价低等特点,具有广阔的应用前景。它是无人飞行器(UAV)的一种特殊机型,其具有十字排列的四个螺旋桨方便起飞与控制,在低空低速状态,可以在狭小的空间里执行任务。与其他无人机比较,由于结构简单,方便携带且维护成本低。无人自主飞行平台能够自主飞行并完成相应任务,与通用有人飞机相比,其造价低廉,可维护性,使用费用都具有明显优势。在近年来的历次战争中,发挥着重要作用,在民用方面与救灾领域运用前景广阔,例如无人机可在发生灾害后及时实施监控灾情,对救灾和灾害处理产生有益影响。因此对于四轴飞行器的研究具有重大的现实意义。
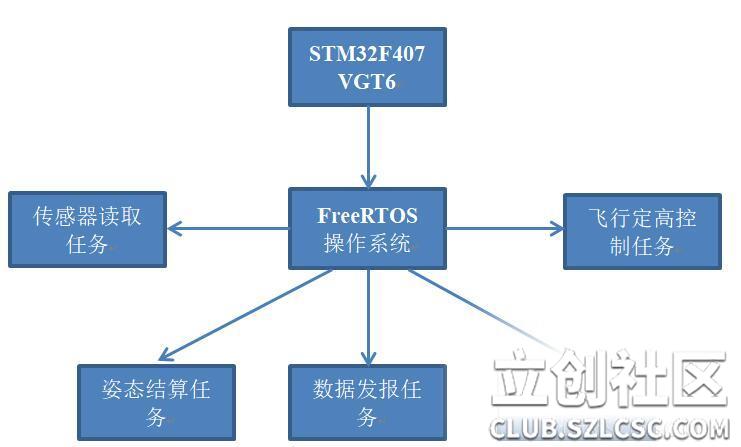
二、系统构架图

三、硬件部分的描述
1.飞控原理图和PCB.zip
2.STM32F407VGT6作为主控MCU。
电源部分:MCU我采用2M开关频率的TPS62162保证了MCU的电源的稳定性,ICM20602,HMC5983采用3.3V LDO供电,MS5611根据数据手册采用3V LDO稳压芯片进行供电保证芯片数据的低噪声。TJA1050采用5V供电。
传感器部分:ICM20602六轴传感器芯片通过数据滤波处理把三轴陀螺仪数据和三轴加速度数据以及HMC5983三轴磁力计数据,MS5611气压计数据引入EKF进行IMU姿态解算。
扩展存储器:WQ25Q32BV用来存储传感器矫正数据。TF卡用来存储飞机飞行记录数据。
灯光模块:我采用3个SOT23-3封装的MOS管进行开关控制,与MCU隔离电源。
遥控器电路:采用传统的DBUS遥控器反向电路。
四、材料清单(BOM列表)
MCU:STM32F407VGT6 商品编号:C12345
6轴传感器:ICM20602
磁力计传感器:HMC5983
气压计传感器:MS5611 商品编号:C37148
电源稳压芯片:TPS62162 商品编号: C40256
LDO:ME6219C33M5G和ME6219C30M5G 商品编号:C47382
扩展ROM存储器:TF卡和SPI FLASH
五、软件部分的描述(选填)
程序源码方面可以参考德国开源飞控AutoQuad飞控,从他的基础之上学习,参考,在加上自己的想法。aq_flight_control-master.zip
六、作品演示
视频是我在参加2017全国电子设计大赛的时候测试视频,所使用的参赛作品(飞行器控制电路板)正式参加此嘉立创大赛设计的作品(飞行器控制电路板)。
网站 : https://v.qq.com/x/page/v0539d2cjfh.html
七、总结
在制作作品期间,我们的动手能力、创造能力和协作精神都得到了极大的提高,我们制作的四旋翼,使用了卡尔曼滤波,四元数融合、多种PID控制器等知识,让我们对如何控制一个多输入控制系统有了更深的认识吗,在绘制自己以前从来没接触过的传感器ICM20602或者是HMC5983等,面对网上参考资料几乎没有,只有通过自己看全英文版的数据手册来一点点的写芯片驱动程序,对于作为大二团队的我们,在面临这样的挑战时,我们没有放弃使用这些优秀的传感器。在通过自己的努力和坚持后,成功写出了传感器驱动程序。在调试控制算法参数时,我们经行了大量反复的修改,虽然很枯燥但是也还是坚持了下来,在调试过程中我们认为一定要和上位机通讯把飞机状态波形,比如Pitch,Roll,Yaw三个欧拉角的状态波形显示出来,通过波形来分析自己的控制算法参数是否合理。在未来,我们计划继续优化完整作品,能够达到给其他用户进行二次平台开发的目的,比如在无人机上加入摄像头视觉辅助,扩展其他各种丰富的功能。对于主办方,如果有必要我们希望可以在资金或者元器件方面给予少许援助,因为作为大二学生的我们,参加此类科技竞赛在资金方面基本都是父母的支持,压力还是有点大的。




 返回列表
返回列表


 发表于2017-06-02 16:40:53
发表于2017-06-02 16:40:53


 回复
回复
 收藏
收藏
 举报
举报




