COCOFLY教程
——疯壳·无人机·系列
遥控整机代码走读、编译与烧写

图1
一、代码架构
遥控的整体代码工程由 7 个工作组组成,分别是 Remoter、show、Driver、STM32_LIB、USB、USB/Lib 以及 Drv_Point,如下图所示。

图2
各个组的具体的代码功能如下表所示。
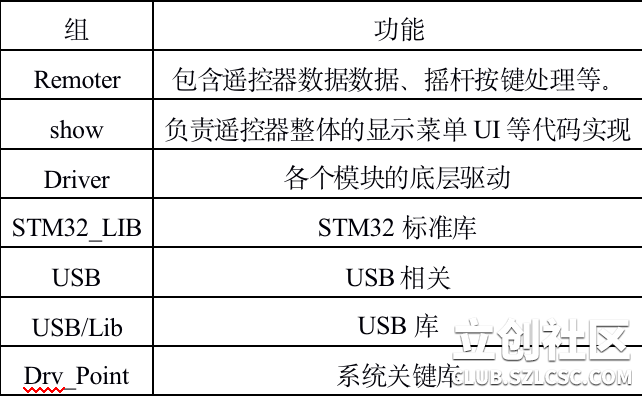
表1
二、代码走读
系统的主函数部分是整个代码的起始运行位置,在主函数内主要做三个事情:1、初始化外设及参数,2、轮询线程函数,3、菜单显示逻辑,其代码如下图所示。

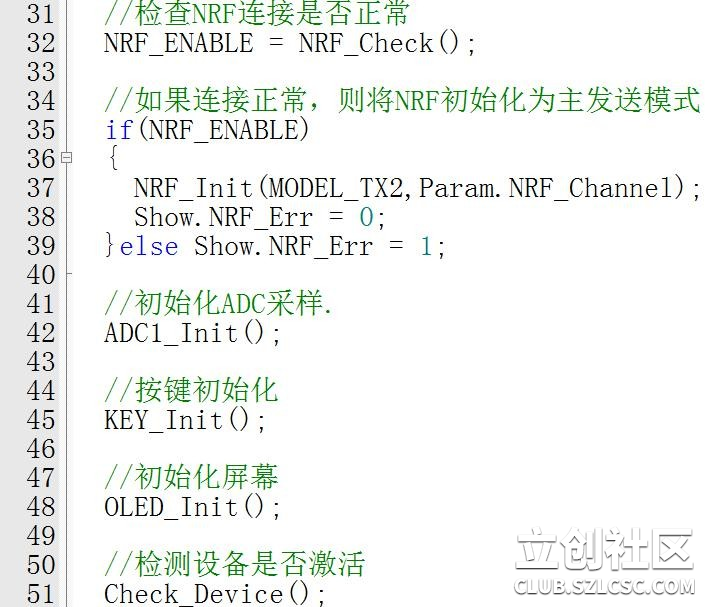
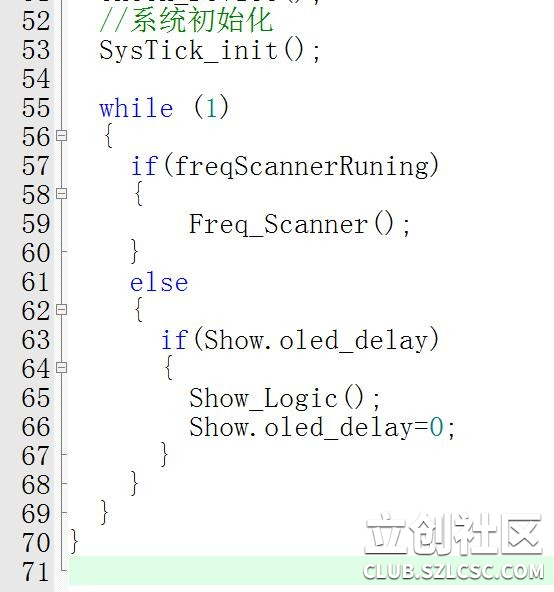
图3
系统的每一个线程函数都已经分配好了运行周期,在不同的线程里执行不同的事情,线程的切换通过简单的逻辑处理形式切换,而系统的运行时间由 sysTick 提供,即系统的“滴答”时钟。各个线程的入口如下。

图4
分别有 1000ms 周期的函数、50ms 周期的函数、10ms 周期的函数、4ms 周期的函数以及 2ms 周期的函数。
整个遥控器的逻辑处理、数据交换的核心部分均在 Remoter 工作组内,该组内的代码框架如下图所示。

图5
其中的 DT.c 负责和飞控、上位机等的通信数据处理,即拆解包、封装包、提取关键数据等,如下图所示为对飞控传输过来的数据进行处理。

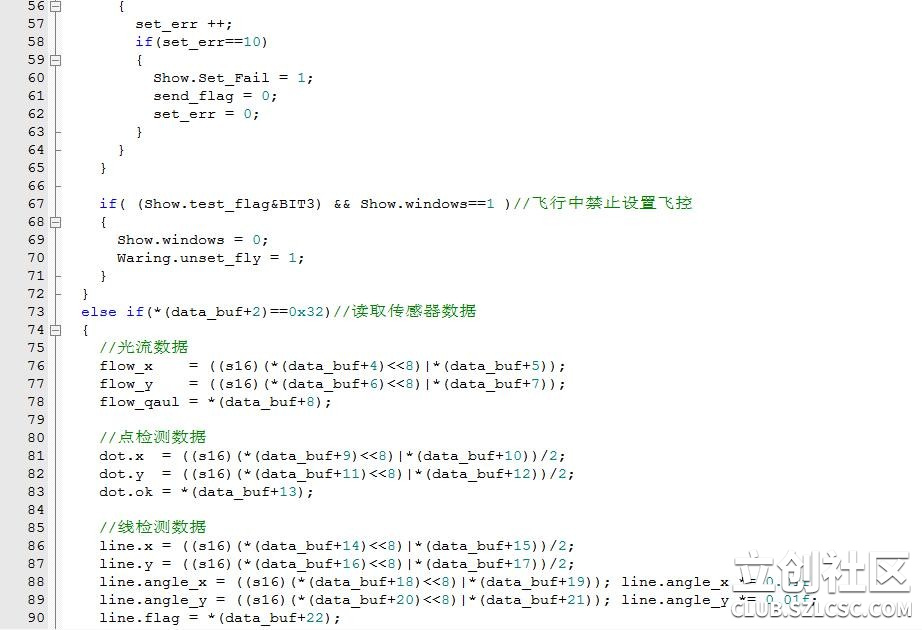
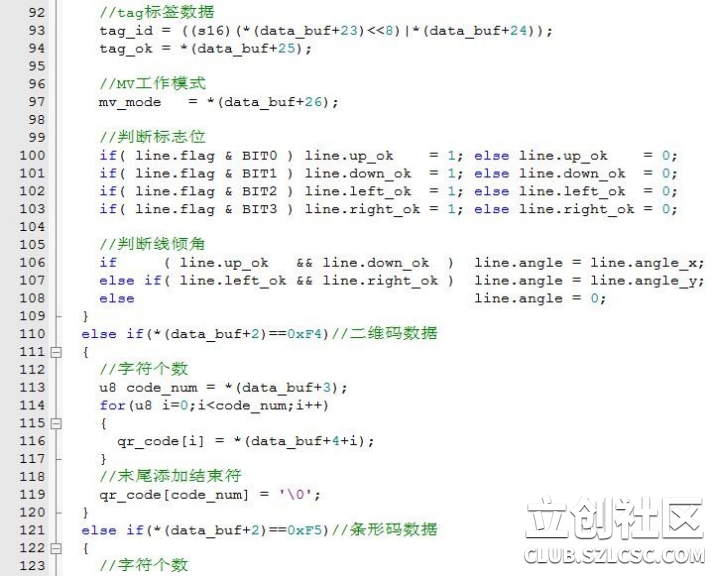

图6
其中 Stick.c 为摇杆逻辑处理,主要对摇杆采集到 ADC 值进行分析,判断需要执行的逻辑。最后的 cocobit.c 是负责和 cocobit 编程板之间的通信。
工作组“show”主要负责了整体的菜单 UI 显示,这里已经做了封装处理。
工作组“Driver”负责各个模块的底层驱动,例如摇杆 ADC 配置、NRF24L01
的 SPI 驱动等。
工作组“USB”以及“USB/Lib”,负责通过 STM32 自带的 USB,虚拟出串口,方便与上位机进行通信。
保存、编译最后把代码烧写的遥控中,配合飞控就可以正常使用了。如下图所示 1 为保存、2 为编译、3 为下载烧写。

图7
文件下载请点击:【2】遥控整机代码走读、编译与烧写.pdf




 返回列表
返回列表


 发表于2022-08-24 14:13:54
发表于2022-08-24 14:13:54



 回复
回复
 收藏
收藏
 举报
举报

