使用说明
CAN总线舵机采用串行异步通信,同一时刻只能有一个发送或接收信息,由CAN_H和CAN_L两条信号线,以差分信号的形式进行通讯, 抗干扰能力强。高低电平幅度低,数据传输速度相对较高。
控制逻辑
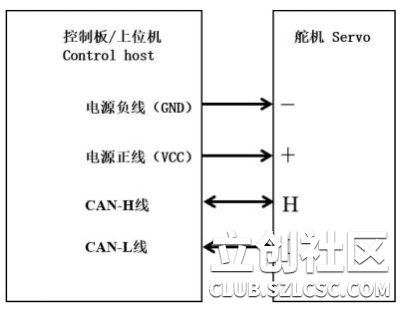
舵机电路简图
CAN信号参数(CAN signal parameter):
波特率(Baud rate): 1155200(默认值)
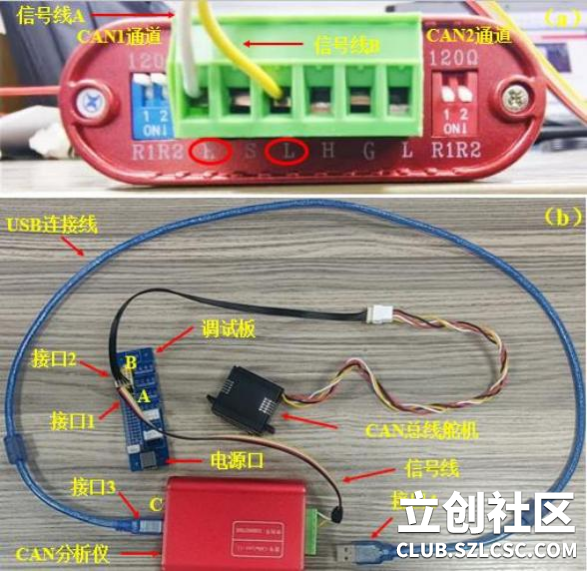
接线步骤
1、将 CAN 分析仪左边 CAN1 通道蓝色拨码开关中的 R1 、R2 拨到上方 OFF 的位置,右边 CAN2 通道红色拨码开关中的 R1 、R2 拨到下方 ON 的位置。正常 CAN 总线上必须保证有两个120 欧终端电阻,否则会影响 CAN 总线正常工作,其中实际应用电阻可修改。
2 、将分析仪 CAN1 通道中的 CANH 和 CANL 用信号线连接作为一组,其中 H 端接信号线
A ,L 端接信号线 B,如图 a 所示。
3、将已连接的 CANH 和 CANL 信号线接口 1 连接至蓝色调试板 A 位置, CAN 总线舵机的 接口 2 连接至蓝色调试板 B 位置(根据电路简图区分引脚),USB 连接线的接口 3 连接至 CAN分析仪 C 位置,如图 b 所示。
4、将 USB 连接线的接口 4 连接 PC 端电脑,电源口接通电源后打开CAN 舵机统一升级
软件.
1 、点击启动 CAN 盒子。
2 、在 CAN 端口号中选择舵机相对应的 CAN 通道。
3 、点击连接 CAN 端口。
4、点击软件下方快速测试区的角度值即可对目标舵机进行角度调试。
注: 软件版本有变化时需要载入舵机的升级文件,并点击开始升级,版本有变化时需进行
升级;如果需要改写 ID 和重写 ID,改完后则需要点击重启舵机。

常见故障
不良现象
不良现象
可能原因
无功能
信号线损坏、马达掉线、芯片假焊、程序未烧录 或烧录错误
反应迟钝,发热严重
电机过流,更换舵机电机
单方向转动后卡住不动
电机的正负极或电位器的端线接错
手感重
齿轮装配不顺畅、底盖压到PCBA、马达内部短 路损坏、油脂过量
舵机抖动
齿轮装配不顺畅、电位器损坏、程序问题
噪音大
齿轮少油、卡齿、蹦齿、齿损
电流大
线序或马达线接反、齿轮卡死、底盖与PCBA短 路、牙箱偏紧导致参数不匹配无法走到目标位置
舵机不回中
电位器损坏或来料不良、电位器与输出齿连接虚 位大、输出齿与客户摇臂或连杆虚位大或卡死
扭力偏差大
选型与规格要求存在偏差、齿轮长时间运行过热 磨损
角度偏差大
电位器损坏或来料不良、电位器与输出齿连接虚 位大、控制信号与规格要求不符
常见问题
问 1:舵机固定在产品上,用外壳定位偏差很大?
答 1:舵机装配以输出齿圆心为中心定位,尽量用两边耳朵孔作固定。
问 2:舵机塑胶齿轮不耐冲击,容易蹦齿?
答 2:需考虑离合齿的舵机来应用,避免产品外部冲击大于堵转扭矩使蹦齿。
问 3:舵机输出齿承受外部冲击导致损坏,输出齿不够强?
答 3:尽量用舵盘及产品结构件支撑来承受外部冲击,避免细小的输出齿承受其大于舵机堵转扭矩的冲击力。
![]()
![]()
![]()
注意事项
1 、请在工作电压和电流范围内使用,切勿超压或过流,以免舵机烧坏或内部损坏。
2、接线前请严格按照接线步骤操作,以免舵机无功能或者不能正常工作。
3、大扭矩舵机使用时务必小心谨慎,防止误操作造成人身伤害。
4、切记不要在舵机工作状态下再向总线上增加新舵机。
5、本产品为高精度产品,请勿人为大力转动舵盘或摆臂,以免产品内部损坏。
6 、切勿在超高负荷状态下运转舵机,尽量选择合适运行转矩。




 返回列表
返回列表


 发表于2024-02-29 16:21:48
发表于2024-02-29 16:21:48



 回复
回复
 收藏
收藏
 举报
举报

