立创君11月3日晚21点插楼提示:该作品已进入首届立创商城电子制作节15强,点我投票参与公投,选出最终6强!
文章最后有详细资料分享,支持开源~
1、作品简介
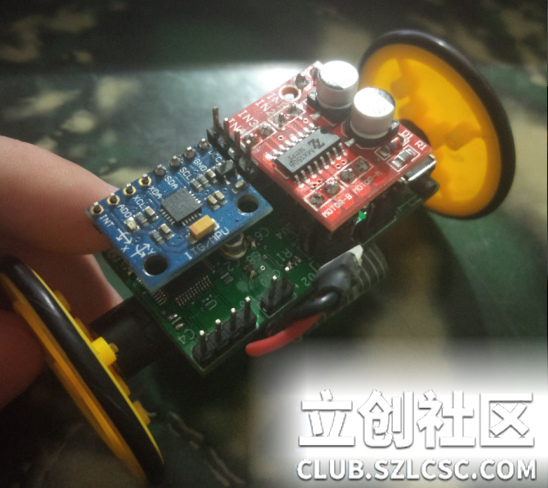
整机图片:
这个电子制作的用途是什么?能实现那些功能?
用途:用来学习使用平衡小车相关的基础知识(I2C,PWM,滤波,姿态计算,PID算法)
实现的功能:通过传感器获取小车姿态并使用控制算法控制小车的平衡,使得小车可以直立不倒
为何要制作这个作品?
当下各种平衡车非常火爆,四处可见踩着平衡车代步的人,于是想探究下其中的原理,于是产生了制作这个作品的想法。
这个作品能给使用者或者社会带来哪些改变、益处或进步?
首先从技术方面来说,通过开发这个作品,可以让使用者学习到很多方面的知识,这个东西涉及了物理,数据协议,数据处理,控制算法等很多方面的知识。
其次从生活方面来说,这个作品可以为使用者的生活带来不少乐趣,看着小车扭扭捏捏的站立着,那种感觉还是很奇妙的。
即:实用性,你自己觉得它体现在哪里?
就实用性方面来说,这个小车是比较有限的。当然,使用者可以通过升级其中的算法来提高精度,甚至可以使用到真实的载人平衡车中去。
2、作品亮点
您这个作品在设计、实现细节或思路上,用上了哪些新技术或者创新之处?
特别好的性能、参数指标也是一个亮点。
亮点概括为两个:
1 PCB 面积非常小(2.5cm*5.0cm)
2 器件可以拆卸,方便开发调试和学习
同网上一般网友制作的平衡小车不一样,这个平衡小车最大的特点就是它的整体很小,PCB面积只有2.5cm*5.0cm,这个可能还没有网友制作的平衡小车的一个电机驱动板大,但是却已经实现了相同的功能。我在器件选型时尽可能用了小的元件,这样使得PCB面积大大减少。
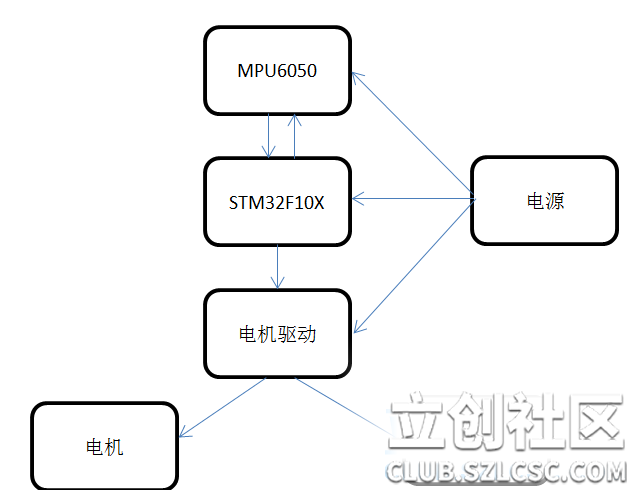
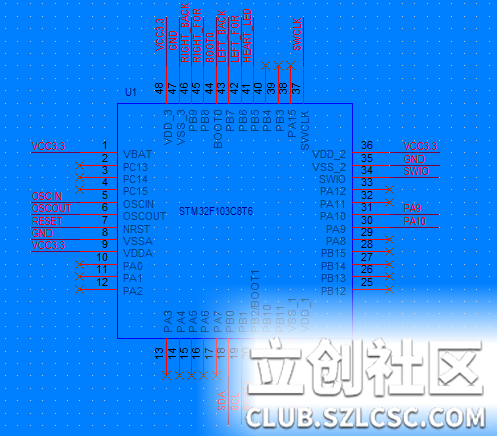
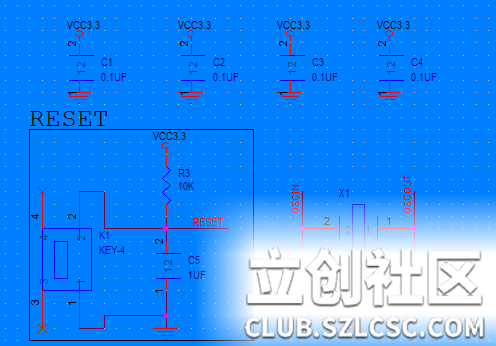
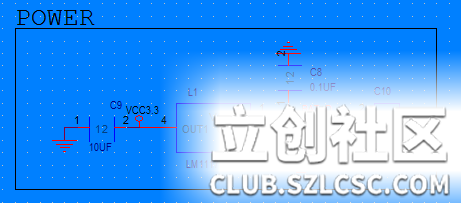
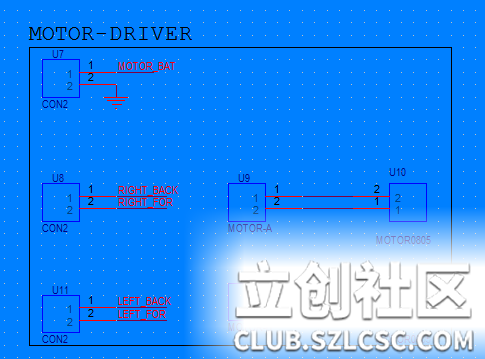
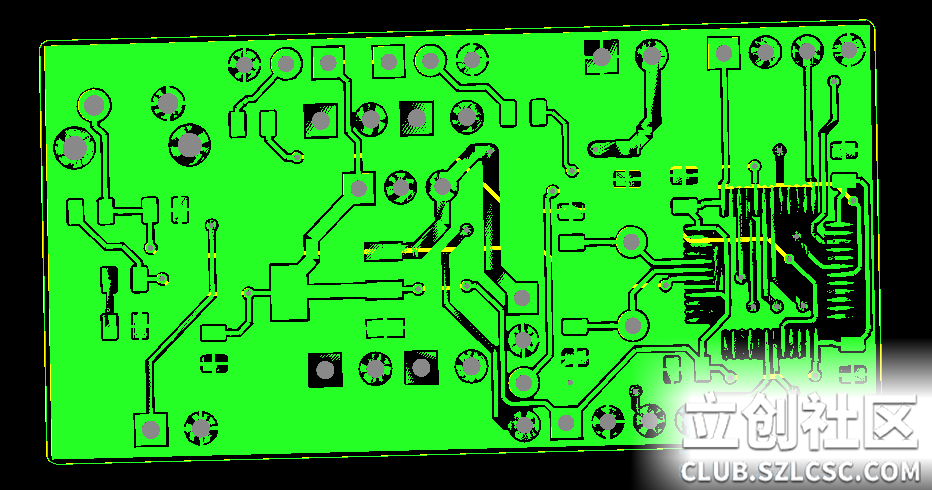
3、系统构架图
4、原理图
附上原理图的图片或者源文件(我们官方建议大家尽量用源文件上传)
如果是图片,请确保图片是清晰可辨的。
此外,还请用文字把该作品的实现原理、系统的工作过程大致讲解一下。
5、材料清单(BOM列表)
RTU_BBear Revised: Saturday, October 22, 2016
Revision: v1.0
Bill Of Materials October 27,2016 20:19:27 Page1
Item Quantity Reference Part
______________________________________________
1 5 C1,C2,C3,C4,C8 0.1UF
2 1 C5 1UF
3 2 C6,C7 22PF
4 1 C9 10UF
5 2 LED2,C10 POWER
6 1 K1 KEY-4
7 1 LED1 HEARTLED
8 1 L1 LM1117
9 3 R1,R2,R3 10K
10 2 R4,R5 1K
11 1 S1 MPU6050
12 1 U1 STM32F103C8T6
13 1 U2 BOOT0
14 1 U3 CON4
15 1 U4 switch
16 1 U5 BOOT1
17 1 U6 SWD
18 3 U7,U8,U11 CON2
19 1 U9 MOTOR-A
20 2 U10,U13 MOTOR0805
21 1 U12 MOTOR-B
22 1 X1 XTAL
关键芯片:
1 STM32F103C8T6
http://www.szlcsc.com/product/details_9243.html
2 MPU6050传感器
http://www.szlcsc.com/product/details_24852.html
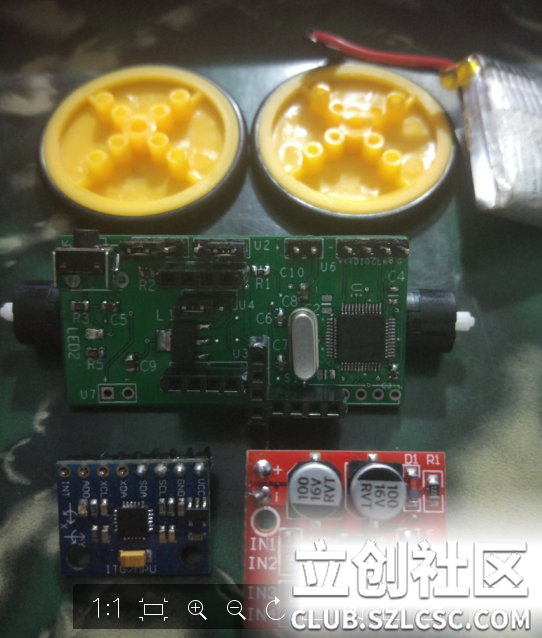
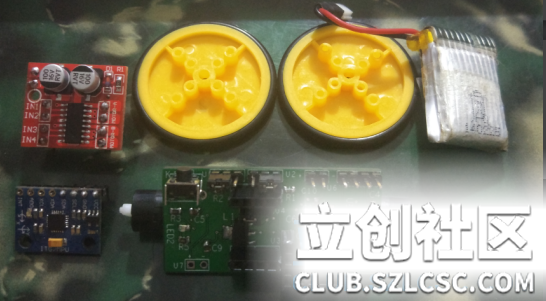
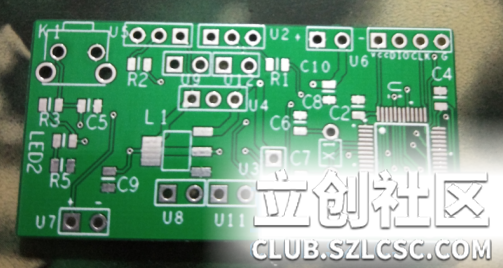
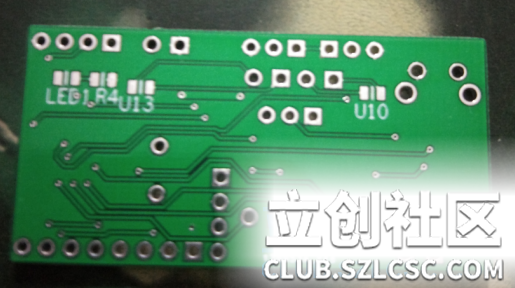
6、PCB实物图
PCB 3D图
PCB 实物图
7、软件部分的描述
软件流程:
软件部分分为两个大部分:
1数据部分
数据部分围绕MPU6050传感器展开。分为数据获取,滤波,数据处理
1.1数据获取
STM32通过I2C和MPU6050进行通讯,其中涉及到基础的I2C通信协议实现,在I2C基础上,涉及到MPU6050各种参数的设置,比如加速度的范围等。不同的设置获取到的数据会不一样并且精度也不一样。
1.2滤波
在获取到原始数据后经过简单转化变为角度,但是这个数据是不准确的,因此需要滤波处理,由于小车比较简单,滤波就用的是互补滤波。这样就能获取比较精确的数据的了。
1.3数据处理
在滤波前需要对获取的原始数据进行处理,这个需要一点点物理知识,起始就是加速度与力的方向是一致的这个原理,还有一个就是角速度的积分操作,这个需要使用定时器来完成。
2控制部分
控制部分主要分为PID算法,电机驱动
2.1PID算法
PID算法就是比例,积分,微分这三个变量相互作用最后输出到控制器上去。在这里我们只需要P就够了。
2.2电机驱动
电机驱动主要设计的知识就是PWM波的控制,STM32有相关的库操作,只需要按要求设置好就OK了。然后将PID算法产生的结果作为参数输入到这里就可以实现控制了。
如果您的作品涉及到软件或者固件,欢迎也介绍介绍。比如列出软件流程图、精彩
或关键部分的例程、源码或者全部源码(如果是您想开源的话)。
8、作品演示
录了个小视频:
让大家见笑了~~~




 返回列表
返回列表




 发表于2016-10-30 00:11:11
发表于2016-10-30 00:11:11



 回复
回复
 收藏
收藏
 举报
举报

