在参赛贴里面说过,电机驱动这类电路不作为项目重点,暂时先尽快弄一个能动的,先玩着,后期再看情况改进。
所以采取一个简单的控制方案:
用现成的常用、低成本电机驱动芯片,由STM32输出PWM驱动,码盘加光耦模块反馈速度,算法采用PID。为简单快速,不做电流环,不做s域(复频域)建模我得意的笑
下面详细分析。
>>>本帖是第二届立创商城电子制作节开源作品参赛《进化传说 -- 上古蜥蜴》的分帖之一,索引主帖:http://club.szlcsc.com/article/details_7053_1.html#floor_5。
编辑原因:增加返回主帖入口
本帖是参赛贴《进化传说之上古蜥蜴》的分贴之一,主贴在此
http://club.szlcsc.com/article/details_7053_1.html#floor_7
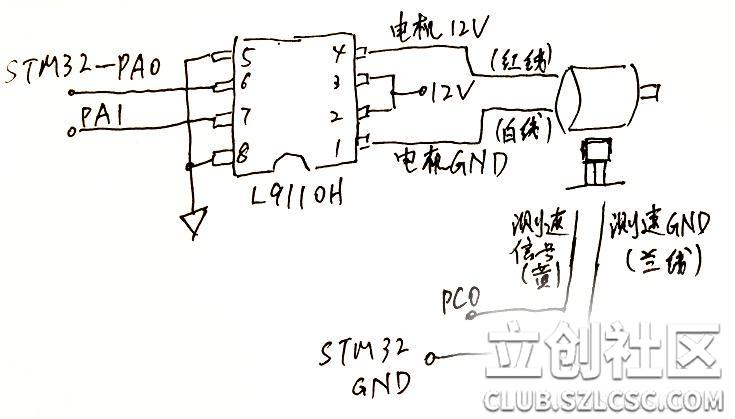
电机驱动是靠通用版和杜邦线接起来的,原理图就上个手绘:
上图是右侧电机的接线。左侧电机要注意,电机12V电源的正负极要对调。左侧的电机PWM信号占用STM32的PA2和PA3,左侧测速信号占用PC2。
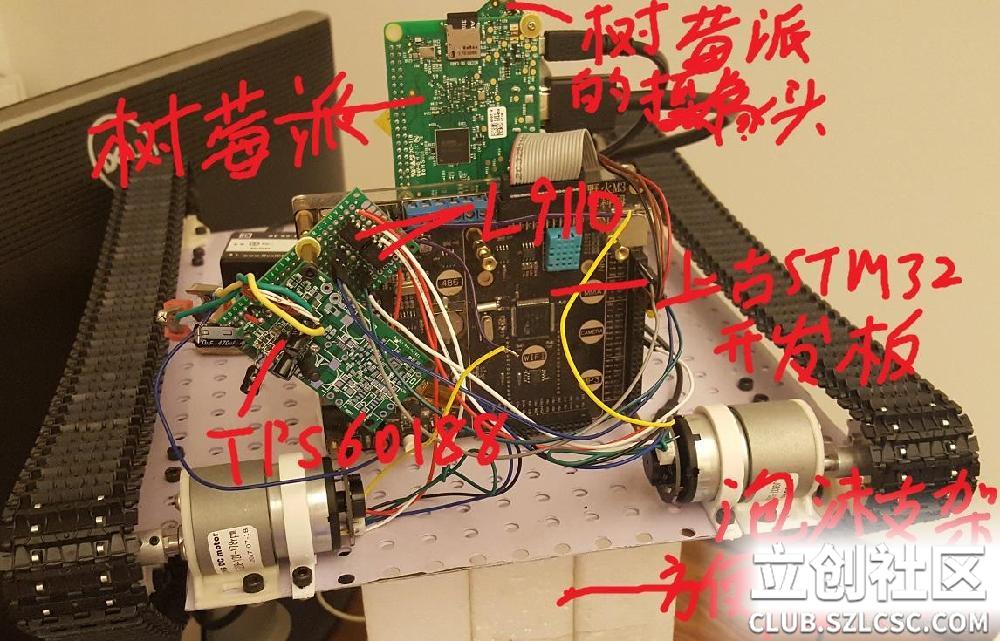
上面两个图是9110。。。。
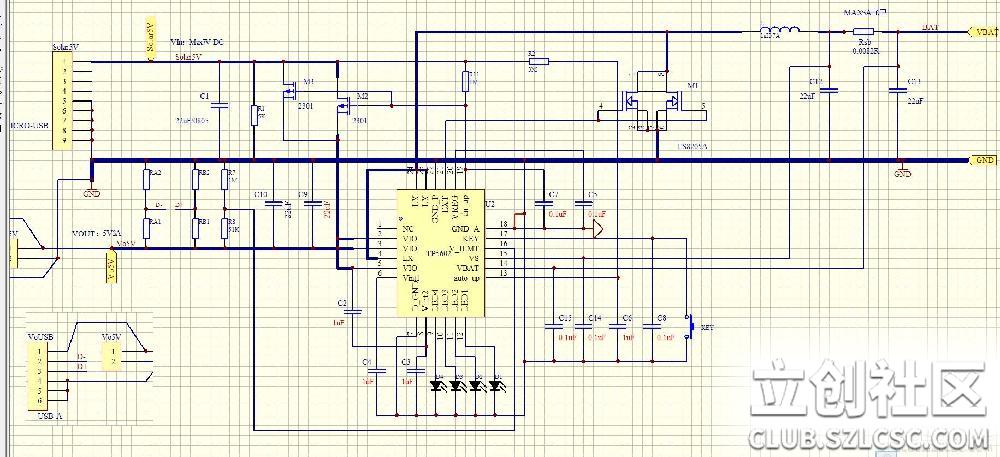
TP5602本来找官方要的支持,可是他们给的东西真够一说的,原理图和PCB文件完全对不上,原理图不能生成netlist(很多元件缺必要的要素,比如Lib ref),PCB根本不是根据netlist画的。。。我花在整理这份文件上的时间就超过两个工作日,比我从头画一个慢多了,无穷无尽的零散线头。。。但是呢,这样的文档传上来,和原厂的PCB布局基本一样,大家不会说干扰太大是因为我画的电路板不好
PCB有个封装画错了,唉,从小到大不管多小心,总是会有疏忽大意的地方,只能靠多次的修改。。。
5602下面是一堆旧手机电池,加旧充电宝拆出来的,加起来可以给手机充两次电,嘿嘿
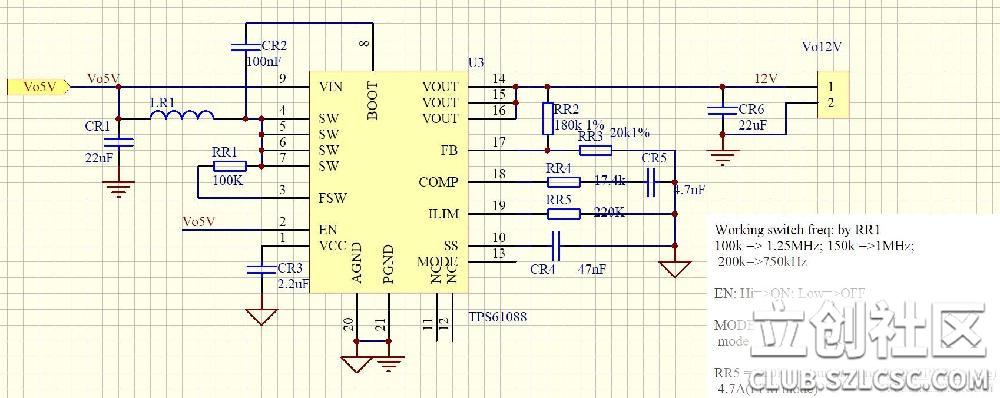
5V升12V的是这货:
TPS61088。图上这俩电解电容是Φ6的。也就是说,TPS61088加上外围元件,一共不到一节小手指大小,可以轻易提供三十多瓦的能量转换。当然,瓦数大了,散热要注意。
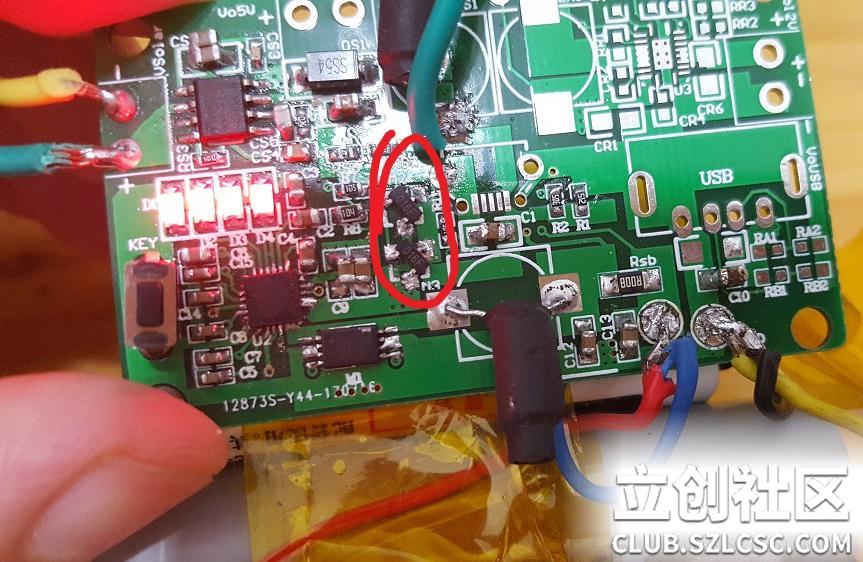
TPS61088和TP5602有个共同的麻烦,就是很难手工焊。后来经过朋友点拨,学会了芯片背面涂锡膏,然后用热风枪焊接的方法,效果还不错,就是前前后后焊坏了好几个芯片。。。
TPS60188的原理图,右边放了一些简单的调试信息
下面该我们的主角上场了,有请好吃不上火的STM32单片机~
说实话,好多年不玩单片机了。这次又从阁楼上把多年前的开发板翻出来,全都是灰,呛得老婆直咳嗽。。。野火开发板,还有人知道吗
不过,多年过去了,这货依然上电就能运行、装好软件就能联机调试。。。STM32F103VET6,72MHz主频
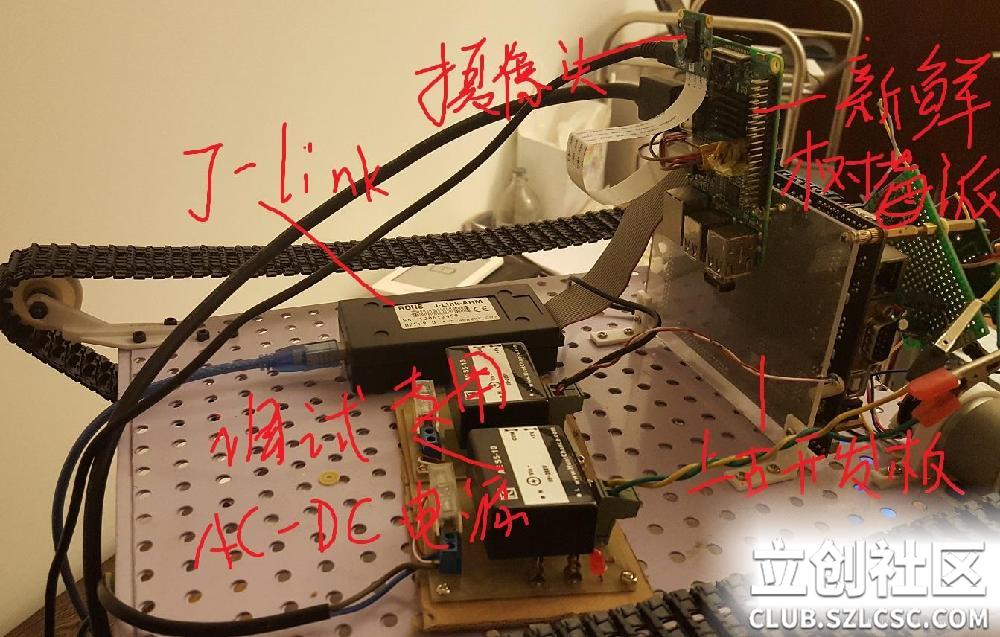
特意3D打印了两个支架把它竖起来,看看临时拼装起来的金属朋克吧
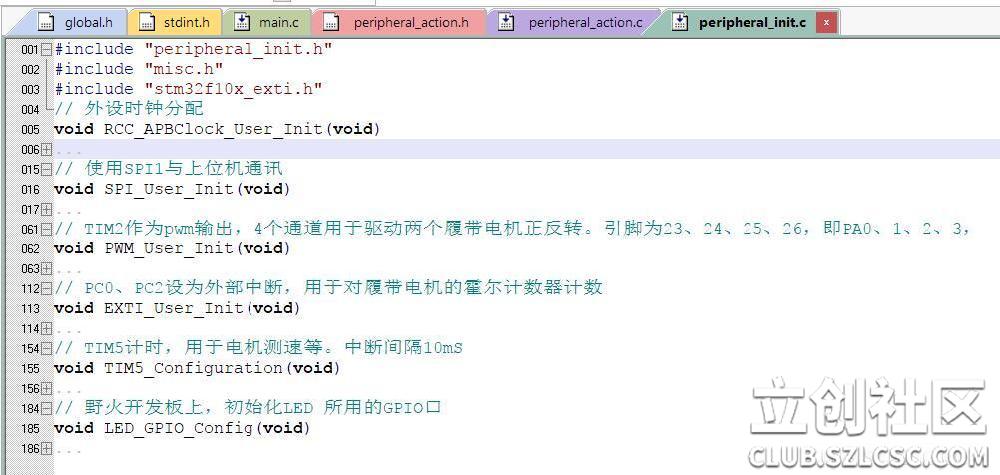
程序没有太多可说的,大部分是相应外设的初始化及控制、读取
下面几张图是PID相关的程序,最后一张是核心算法
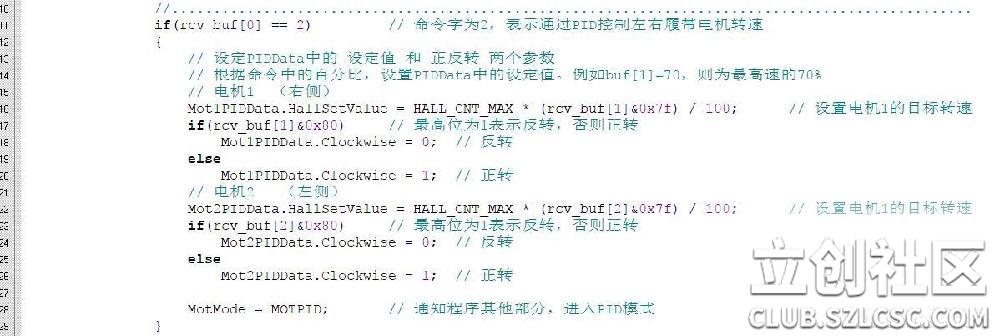
上图是STM32程序里,SPI中断处理中的一段,用于解释命令字为2的命令,并根据命令设置相关参数
上图为定时器中断,分别用于更新速度测定值以及在PID模式下定时通知主程序进行PID更新计算,在main函数的主循环中:
while(1) { if(MotMode == MOTPID) if(MayUpdatePID) { UpdatePID(); } }
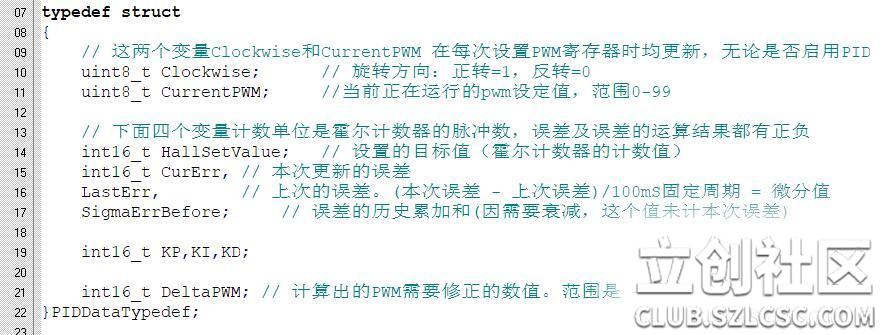
PID相关的数据结构
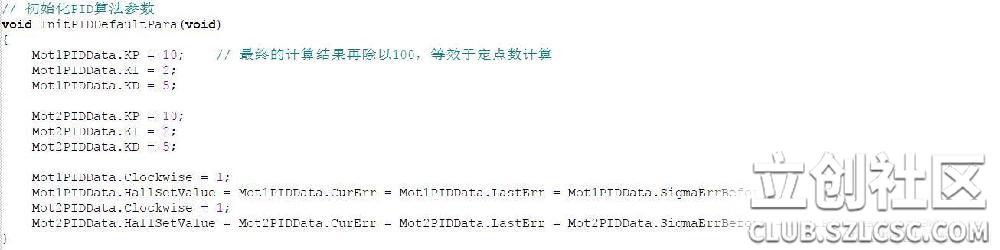
上图为现在使用的PID参数(下半部分为初始值)
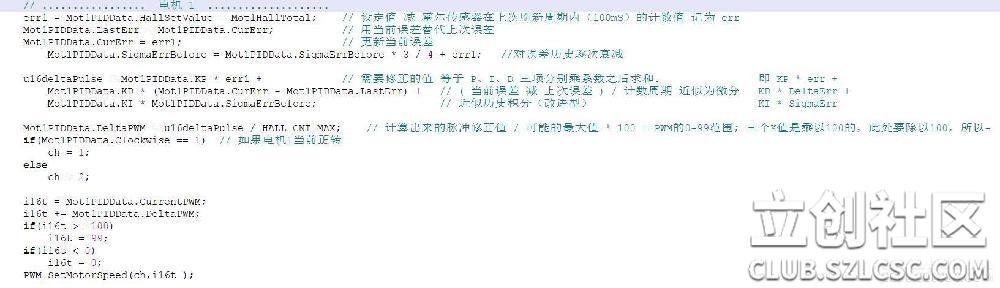
PID核心算法,其实很简单,ΔPWM = Kp*P + Ki * I + Kd*d; PWM += ΔPWM就可以了
PID运行演示视频
https://v.qq.com/x/page/x0540pae5xw.html
视频中,PID的参数采用楼上图片中的参数,可以看到明显的PID调整的特点。两次手握住履带后,电机受到阻力立刻减速,然后由于PID算法的作用,PWM占空比增加,履带又顽强地开始加速到目标速度,此时占空比很大,履带底盘在泡沫的架子上咔哒咔哒乱动,尤其第二次更明显。
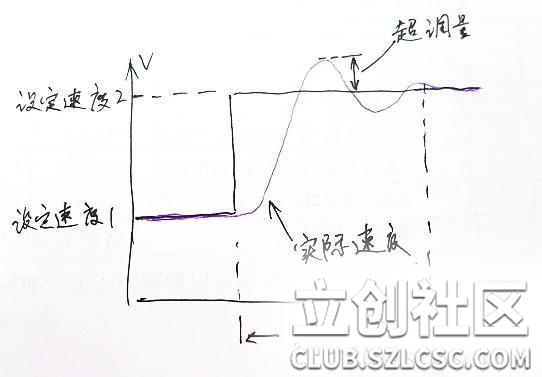
由于占空比很大,突然松手履带就会转得很快,此时PID调节再次起作用,速度迅速降低,然而存在超调现象,也就是速度降低到预设速度之后并没有停止下降,而是继续减慢。然后又在算法调整下慢慢逼近设定值,这就是超调现象。超调的成因,固然是PID参数(也就是Kp、Ki、Kd)需要精细调整,但是,PID算法很难在大范围内保持良好的性能,例如在负载变化很大的情况下兼顾调节速度与超调量。如果需要更好的性能,需要更“高端”的控制理论。
典型的PID调节过程。当然也可以通过调整参数,让曲线在上升到设定速度2之前停止上升,但是那样调整时间就会变长很多




 返回列表
返回列表


 发表于2017-06-24 23:34:38
发表于2017-06-24 23:34:38


 我得意的笑
我得意的笑

 回复
回复
 收藏
收藏
 举报
举报