



 返回列表
返回列表
|
查看:
15799
回复: 12 |
参赛作品《大疆精灵2开源头追与osd抬头显示系统》
|
|||


|
1#
电梯直达

【报名阶段需要填写的内容】 1. 参赛者姓名(必填项): 黄何 2. 单位或学校名称(必填项): 广西梧州蒙山电信公司 3. 当前职务或职称(必填项): 工程师 4. 参赛作品的名字(必填项): 大疆精灵2开源头追与osd抬头显示系统 5. 简要陈述您的idea和作品(必填项): 大疆精灵2是大疆出的精灵系列第二代四轴飞行器,相比一代,二代采用了全新智能电池设计,电池信息和GPS信息等通过CAN接口通讯。此制作分为两大部分。
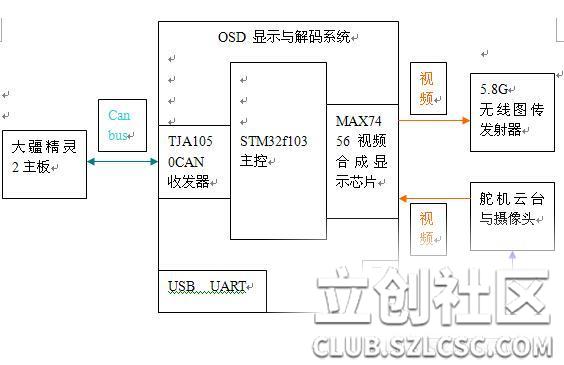
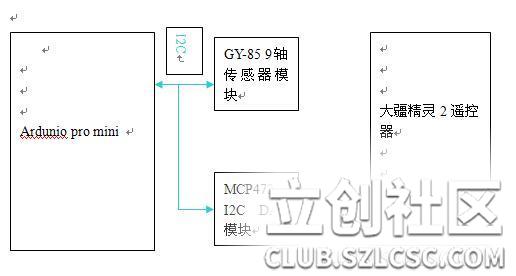
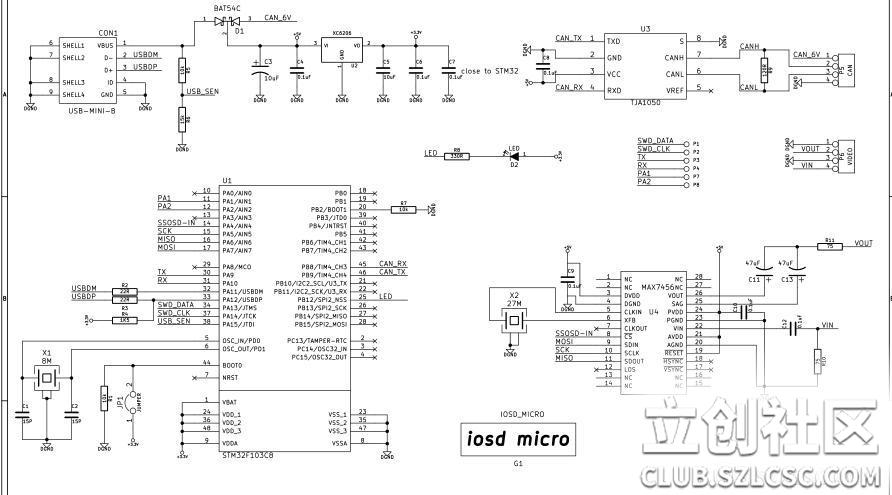
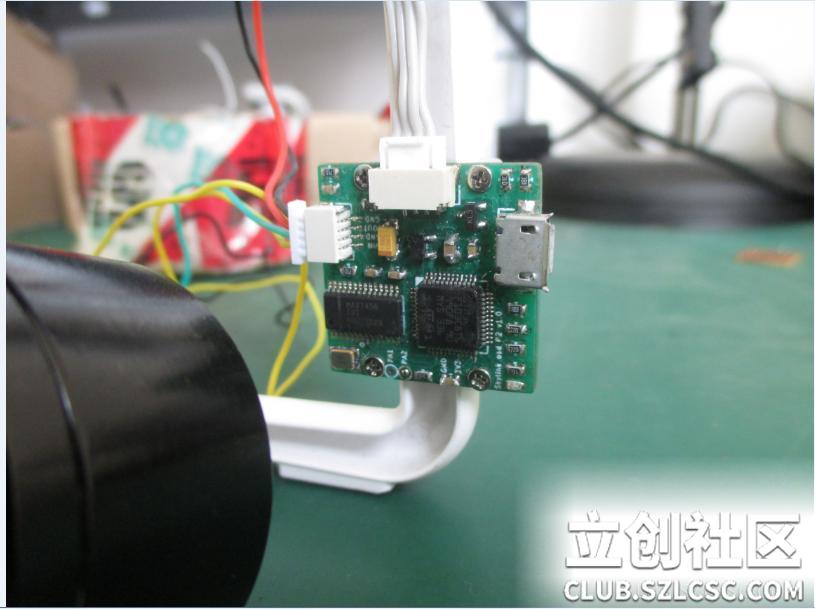
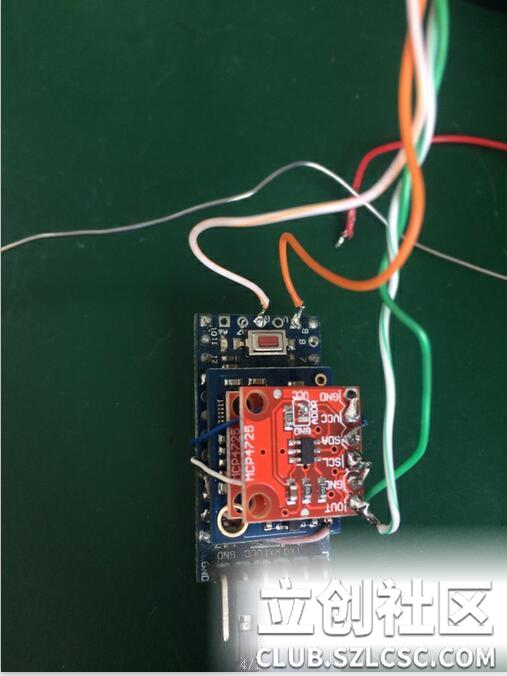
6. 拟用到的立创商城在售物料(必填项): stm32f103c8t6 tja1050 at7456 atmega328 7. 拟用到的非立创商城物料或其它补充(必填项): GY-85模块 一些接插件 【作品正式发表(报名成功后进入设计阶段)需要填写的内容】 一、作品简介 大疆精灵2是大疆出的精灵系列第二代四轴飞行器,发布于2015年,现在大疆公司不断推陈出新,大疆精灵系列已经出到了第4代,大疆精灵2集成度没有后边的几代集成度高,但相对的,留给DIYER们改造的空间也相对较大,本制作就是针对大疆精灵2的can信息进行解码,来扩展改造。此制作分为两大部分。 二、系统构架图 OSD系统框图 头追系统框图 三、硬件部分的描述 OSD原理图与成品图 头追系统成品图: 主要原理: 1.osd 抬头显示系统。 大疆精灵2飞控系统,会不断的向CAN总线传送各种飞控状态信息和控制信息,改OSD设计就是解码精灵2的can数据,解析出四轴飞行器的电池信息,GPS信息,飞行高度,和遥控器摇杆数值,各种飞控信息通过stm32的can模块接受并解码,送osd芯片结合摄像头传来的图像信息,进行字符叠加,再通过5.8G视频无线图传模块传送到地面接收。地面通过5.8g视频接收模块接收并显示图像。解码出的遥控器的两个通道的数据,由stm32转换成pwm输出给舵机,从而控制舵机的转向和俯仰,实现挂在舵机上的摄像头随地面遥控信号动作。 2.头追系统。 头追系统主要由一块ardunio 板和GY-85 9轴传感器和两个I2C接口的DAC芯片组成,这里采用了现成的模块搭接。ardinuo 读取9轴传感器的状态和磁力计的数据,进行融合计算,转换成俯仰,横滚,朝向的变化数值,并通过DAC芯片转换成电压给遥控器的两个通道读取,模拟遥控器的电阻器动作,从而实现头部的动作模拟成摇杆的动作,控制飞行器上的舵机转动。这样飞行器上摄像头就随着地面控制人员的头部运动而运动,模拟飞机上上下左右看的感觉。 skylink_osd_p2_V1.0_PCB.zip 原理图和PCB文件(采用kicad软件) 四、材料清单(BOM列表) stm32f103c8t6 商品编号:C8734 tja1050 商品编号:C112947 at7456 商品编号:C82351 atmega328 商品编号:C14877 mcp4725 商品编号:C61423 GY-85模块 https://item.taobao.com/item.htm?spm=a230r.1.14.36.76bf5236XgcH1&id=35070081530&ns=1&abbucket=5#detail
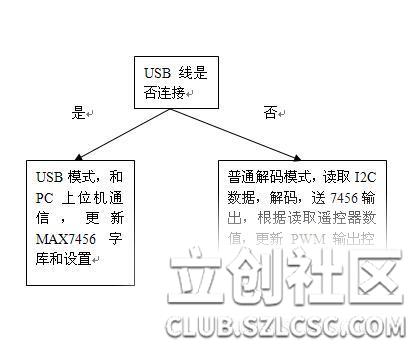
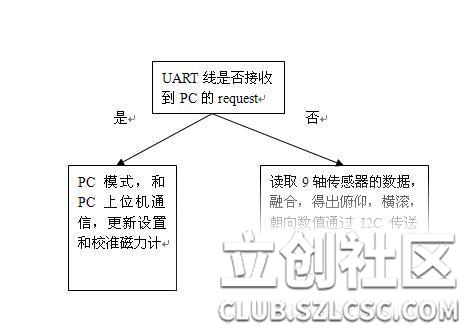
五、软件部分的描述(选填) OSD软件流程 头追软件流程 osd 大疆can信息解码代码 uint16_t NazaCanDecoderLib::decode()
{
uint16_t msgId = NAZA_MESSAGE_NONE;
if(can.available())
{
can.read(&RxMessage);
if(RxMessage.StdId == 0x090) canMsgIdIdx = 0;
else if(RxMessage.StdId == 0x108) canMsgIdIdx = 1;
else if(RxMessage.StdId == 0x7F8) canMsgIdIdx = 2;
else return msgId; // we don't care about other CAN messages
for(uint8_t i = 0; i < RxMessage.DLC; i++)
{
canMsgByte = RxMessage.Data[i];
if(collectData[canMsgIdIdx] == 1)
{
msgBuf[canMsgIdIdx].bytes[msgIdx[canMsgIdIdx]] = canMsgByte;
if(msgIdx[canMsgIdIdx] == 3)
{
msgLen[canMsgIdIdx] = msgBuf[canMsgIdIdx].header.len;
}
msgIdx[canMsgIdIdx] += 1;
if((msgIdx[canMsgIdIdx] > (msgLen[canMsgIdIdx] + 8)) || (msgIdx[canMsgIdIdx] > 256)) collectData[canMsgIdIdx] = 0;
}
// Look fo header
if(canMsgByte == 0x55) { if(header[canMsgIdIdx] == 0) header[canMsgIdIdx] = 1; else if(header[canMsgIdIdx] == 2) header[canMsgIdIdx] = 3; else header[canMsgIdIdx] = 0;}
else if(canMsgByte == 0xAA) { if(header[canMsgIdIdx] == 1) header[canMsgIdIdx] = 2; else if(header[canMsgIdIdx] == 3) { header[canMsgIdIdx] = 0; collectData[canMsgIdIdx] = 1; msgIdx[canMsgIdIdx] = 0; } else header[canMsgIdIdx] = 0;}
else header[canMsgIdIdx] = 0;
// Look fo footer
if(canMsgByte == 0x66) { if(footer[canMsgIdIdx] == 0) footer[canMsgIdIdx] = 1; else if(footer[canMsgIdIdx] == 2) footer[canMsgIdIdx] = 3; else footer[canMsgIdIdx] = 0;}
else if(canMsgByte == 0xCC) { if(footer[canMsgIdIdx] == 1) footer[canMsgIdIdx] = 2; else if(footer[canMsgIdIdx] == 3) { footer[canMsgIdIdx] = 0; if(collectData[canMsgIdIdx] != 0) collectData[canMsgIdIdx] = 2; } else footer[canMsgIdIdx] = 0;}
else footer[canMsgIdIdx] = 0;
if(collectData[canMsgIdIdx] == 2)
{
if(msgIdx[canMsgIdIdx] == (msgLen[canMsgIdIdx] + 8))
{
if(msgBuf[canMsgIdIdx].header.id == NAZA_MESSAGE_MSG1002)
{
float magCalX = msgBuf[canMsgIdIdx].msg1002.magCalX;
float magCalY = msgBuf[canMsgIdIdx].msg1002.magCalY;
headingNc = -atan2(magCalY, magCalX) / M_PI * 180.0;
if(headingNc < 0) headingNc += 360.0;
float headCompX = msgBuf[canMsgIdIdx].msg1002.headCompX;
float headCompY = msgBuf[canMsgIdIdx].msg1002.headCompY;
heading = atan2(headCompY, headCompX) / M_PI * 180.0;
if(heading < 0) heading += 360.0;
sat = msgBuf[canMsgIdIdx].msg1002.numSat;
gpsAlt = msgBuf[canMsgIdIdx].msg1002.altGps;
lat = msgBuf[canMsgIdIdx].msg1002.lat / M_PI * 180.0;
lon = msgBuf[canMsgIdIdx].msg1002.lon / M_PI * 180.0;
alt = msgBuf[canMsgIdIdx].msg1002.altBaro;
float nVel = msgBuf[canMsgIdIdx].msg1002.northVelocity;
float eVel = msgBuf[canMsgIdIdx].msg1002.eastVelocity;
spd = sqrt(nVel * nVel + eVel * eVel);
cog = atan2(eVel, nVel) / M_PI * 180;
if(cog < 0) cog += 360.0;
vsi = -msgBuf[canMsgIdIdx].msg1002.downVelocity;
msgId = NAZA_MESSAGE_MSG1002;
}
else if(msgBuf[canMsgIdIdx].header.id == NAZA_MESSAGE_MSG1003)
{
uint32_t dateTime = msgBuf[canMsgIdIdx].msg1003.dateTime;
second = dateTime & 0x3f; dateTime >>= 6; //0b00111111
minute = dateTime & 0x3f; dateTime >>= 6; //0b00111111
hour = dateTime & 0x0f; dateTime >>= 4; //0b00001111
day = dateTime & 0x3f; dateTime >>= 5; if(hour > 7) day++; //0b00011111
month = dateTime & 0x0f; dateTime >>= 4; //0b00001111
year = dateTime & 0x7f; //0b01111111
gpsVsi = -msgBuf[canMsgIdIdx].msg1003.downVelocity;
vdop = (double)msgBuf[canMsgIdIdx].msg1003.vdop / 100;
double ndop = (double)msgBuf[canMsgIdIdx].msg1003.ndop / 100;
double edop = (double)msgBuf[canMsgIdIdx].msg1003.edop / 100;
hdop = sqrt(ndop * ndop + edop * edop);
uint8_t fixType = msgBuf[canMsgIdIdx].msg1003.fixType;
uint8_t fixFlags = msgBuf[canMsgIdIdx].msg1003.fixStatus;
switch(fixType)
{
case 2 : fix = FIX_2D; break;
case 3 : fix = FIX_3D; break;
default: fix = NO_FIX; break;
}
if((fix != NO_FIX) && (fixFlags & 0x02)) fix = FIX_DGPS;
msgId = NAZA_MESSAGE_MSG1003;
}
else if(msgBuf[canMsgIdIdx].header.id == NAZA_MESSAGE_MSG1009)
{
for(uint8_t j = 0; j < 10; j++)
{
rcIn[j] = msgBuf[canMsgIdIdx].msg1009.rcIn[j];
}
#ifndef GET_SMART_BATTERY_DATA
battery = msgBuf[canMsgIdIdx].msg1009.batVolt;
#endif
// rollRad = msgBuf[canMsgIdIdx].msg1009.roll;
// pitchRad = msgBuf[canMsgIdIdx].msg1009.pitch;
rollRad = msgBuf[canMsgIdIdx].msg1009.stabRollIn;
pitchRad = msgBuf[canMsgIdIdx].msg1009.stabPitchIn;
roll = (int8_t)(rollRad*0.1);
pitch = (int8_t)(pitchRad*0.1);
// roll = (int8_t)(rollRad * 180.0 / M_PI);
// pitch = (int8_t)(pitchRad * 180.0 / M_PI);
mode = (NazaCanDecoderLib::mode_t)msgBuf[canMsgIdIdx].msg1009.flightMode;
msgId = NAZA_MESSAGE_MSG1009;
}
#ifdef GET_SMART_BATTERY_DATA
else if(msgBuf[canMsgIdIdx].header.id == NAZA_MESSAGE_MSG0926)
{
battery = msgBuf[canMsgIdIdx].msg0926.voltage;
batteryPercent = msgBuf[canMsgIdIdx].msg0926.chargePercent;
for(uint8_t j = 0; j < 3; j++)
{
batteryCell[j] = msgBuf[canMsgIdIdx].msg0926.cellVoltage[j];
}
msgId = NAZA_MESSAGE_MSG0926;
}
#endif
}
collectData[canMsgIdIdx] = 0;
}
}
}
return msgId;
} 头追系统融合代码
//--------------------------------------------------------------------------------------
// Func: Filter
// Desc: Filters / merges sensor data.
//--------------------------------------------------------------------------------------
void FilterSensorData()
{
int temp = 0;
// Used to set initial values.
if (resetValues == 1)
{
#if FATSHARK_HT_MODULE
digitalWrite(BUZZER, HIGH);
#endif
resetValues = 0;
tiltStart = 0;
panStart = 0;
rollStart = 0;
UpdateSensors();
GyroCalc();
AccelCalc();
MagCalc();
panAngle = 0;
tiltStart = accAngle[0];
panStart = magAngle[2];
rollStart = accAngle[1];
#if FATSHARK_HT_MODULE
digitalWrite(BUZZER, LOW);
#endif
}
// Simple FilterSensorData, uses mainly gyro-data, but uses accelerometer to compensate for drift
rollAngle = (rollAngle + ((gyroRaw[0] - gyroOff[0]) * cos((tiltAngle - 90) / 57.3) + (gyroRaw[2] - gyroOff[2]) * sin((tiltAngle - 90) / 57.3)) / (SAMPLERATE * SCALING_FACTOR)) * gyroWeightTiltRoll + accAngle[1] * (1 - gyroWeightTiltRoll);
tiltAngle = (tiltAngle + ((gyroRaw[1] - gyroOff[1]) * cos((rollAngle - 90) / 57.3) + (gyroRaw[2] - gyroOff[2]) * sin((rollAngle - 90) / 57.3) * -1) / (SAMPLERATE * SCALING_FACTOR)) * gyroWeightTiltRoll + accAngle[0] * (1 - gyroWeightTiltRoll);
panAngle = (panAngle + ((gyroRaw[2] - gyroOff[2]) * cos((tiltAngle - 90) / 57.3) + (((gyroRaw[0] - gyroOff[0]) * -1) * (sin((tiltAngle - 90) / 57.3)) ) + ( ((gyroRaw[1] - gyroOff[1]) * 1) * (sin((rollAngle - 90) / 57.3)))) / (SAMPLERATE * SCALING_FACTOR)) * GyroWeightPan + magAngle[2] * (1 - GyroWeightPan);
if (TrackerStarted)
{
// All low-pass filters
tiltAngleLP = tiltAngle * tiltRollBeta + (1 - tiltRollBeta) * lastTiltAngle;
lastTiltAngle = tiltAngleLP;
rollAngleLP = rollAngle * tiltRollBeta + (1 - tiltRollBeta) * lastRollAngle;
lastRollAngle = rollAngleLP;
panAngleLP = panAngle * panBeta + (1 - panBeta) * lastPanAngle;
lastPanAngle = panAngleLP;
float panAngleTemp = panAngleLP * panInverse * panFactor;
if ( (panAngleTemp > -panMinPulse) && (panAngleTemp < panMaxPulse) )
{
temp = servoPanCenter + panAngleTemp;
channel_value[htChannels[0]] = (int)temp;
}
float tiltAngleTemp = (tiltAngleLP - tiltStart) * tiltInverse * tiltFactor;
if ( (tiltAngleTemp > -tiltMinPulse) && (tiltAngleTemp < tiltMaxPulse) )
{
temp = servoTiltCenter + tiltAngleTemp;
channel_value[htChannels[1]] = temp;
}
float rollAngleTemp = (rollAngleLP - rollStart) * rollInverse * rollFactor;
if ( (rollAngleTemp > -rollMinPulse) && (rollAngleTemp < rollMaxPulse) )
{
temp = servoRollCenter + rollAngleTemp;
channel_value[htChannels[2]] = temp;
}
}
}
ebox_skylink_osd_p2_fw_v1.0.zip osd源代码 skylink_osd_p2_PC_v1.0.zip osd上位机代码 DIY_Headtracker.zip 头追代码与设计 六、作品演示 七、总结 这个方案是模拟遥控器的摇杆动作的,所以要接线到遥控器的两个通道,这样其实很别扭,下一步是要用433m无线模块替代模拟摇杆,做到真正的免连线头追。 |
|||
|
|
2#
欢迎参与! 很炫很COOL的作品,期待楼主的佳作
您已经报名成功! 您现在就可以开始进行设计工作了,后期相关内容请在一楼编辑进行完善。 当前所有参赛选手分值统计表及活动详细介绍见: http://www.szlcsc.com/go/17523dej |
|||
|
|
3#
>楼主已完成主动传播,恭喜再获5分。 >参赛选手分值统计表及活动详细介绍见:http://www.szlcsc.com/go/17523dej >报名成功后只需在朋友圈发布特定的图文内容即视为主动传播,这就是传说中的“送分题”,详询立创君微信号:LCSCSZ。 |
|||
|
|
4#
无人机大佬

|
|||
|
|
5#
看起来很酷

|
|||
|
|
6#
这个好
|
|||
|
|
7#
看上去可以哦
|
|||
|
|
8#
期待看飞行演示视频
|
|||
|
|
9#
就等看表演了
|
|||
|
|
10#
看这效果不错啊,没有太大的晃动,能支持飞行多久呀
|
|||
|
|
11#
15分钟吧
|
|||
|
|
12#
在这激动人心的时刻,恭喜楼主入选第二届立创商城电子制作节30强,30强&入围奖名单:http://club.szlcsc.com/article/details_8910_1.html
第三阶段投票正式开始,这不仅仅是对您自己实力的认可,更是对其他选手的肯定,还是一个继续学习的机会,为您喜爱的作品投上您那宝贵的一票,投票:http://club.szlcsc.com/article/details_8913_1.html |
|||
|
|
13#
祝楼主能够进入6强。
|
 发表于2017-06-17 10:03:24
发表于2017-06-17 10:03:24




 回复
回复
 收藏
收藏
 举报
举报


|

