【报名阶段需要填写的内容】
1. 参赛者姓名(必填项):
程人杰 王徽
2. 单位或学校名称(选填项):
3. 当前职务或职称(选填项):
4. 参赛作品的名字(必填项):
STM32/STM8离线下载器
5. 简要陈述您的idea和作品(必填项):
当前嵌入式开发中,STM32与STM8是大多数工程师使用的主控芯片,传统的方法是通过电脑和仿真器进行程序的下载,生产上也就必须要配置有电脑,但是对于一些量产型生产,通过电脑显然合适,增加工作量, 同而且需要一定的专业知识,时把生产文件交给生产人员,非常有可能产生泄密,产生巨大的损失。而离线下载器具有体积小,价格便宜,而且可以在程序中设置生产次数,配置加密,可以有效的保护好生产资料,同时离线下载器操作方便,只要工程师在电脑上配置好后,就可以放心的交给生产人员。
6. 拟用到的立创商城在售物料(必填项):
STM32,STM8,W25Q64,缓冲器,电源,电阻电容。
7. 拟用到的非立创商城物料或其它补充(必填项):
TFT,外壳
8. 拟用到的EDA工具软件名称(必填项):
Keil,VS2017,立创EDA设计工具
【作品正式发表(报名成功后进入设计阶段)需要填写的内容】
一、作品简介
例如,可以包括但不局限于以下内容:
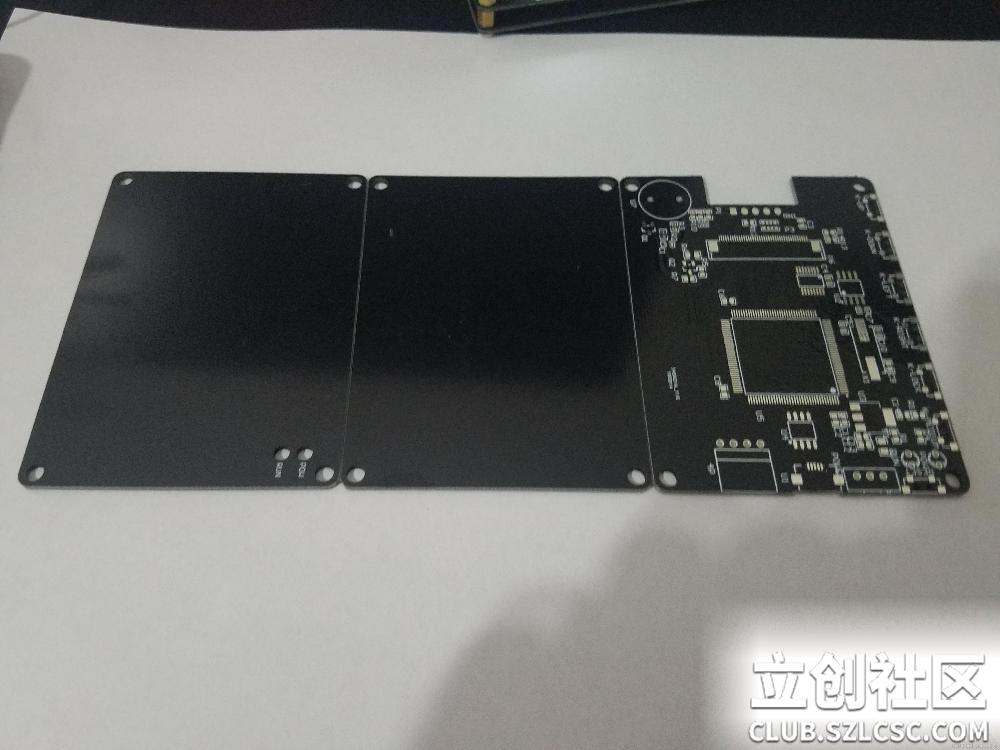
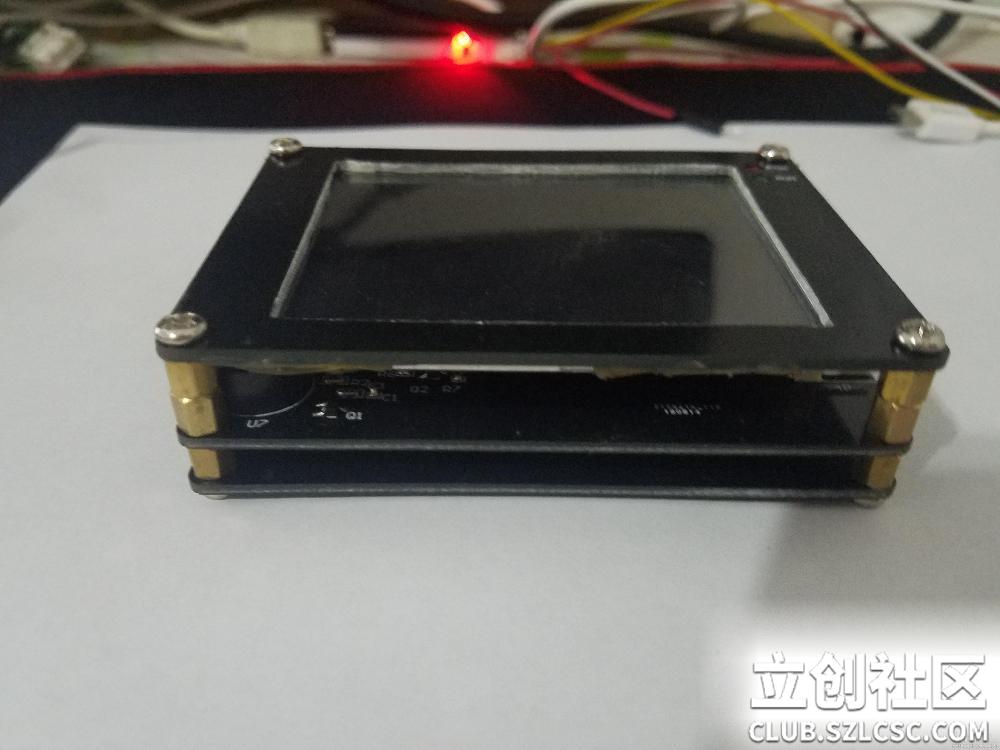
1.作品的整机外观图片或焊接组装好的PCBA图片;



2.作品的研究背景、目的和功能、市场应用前景;
3.作品在创新性、趣味性、实用性甚至公益性方面,有哪些亮点可体现?
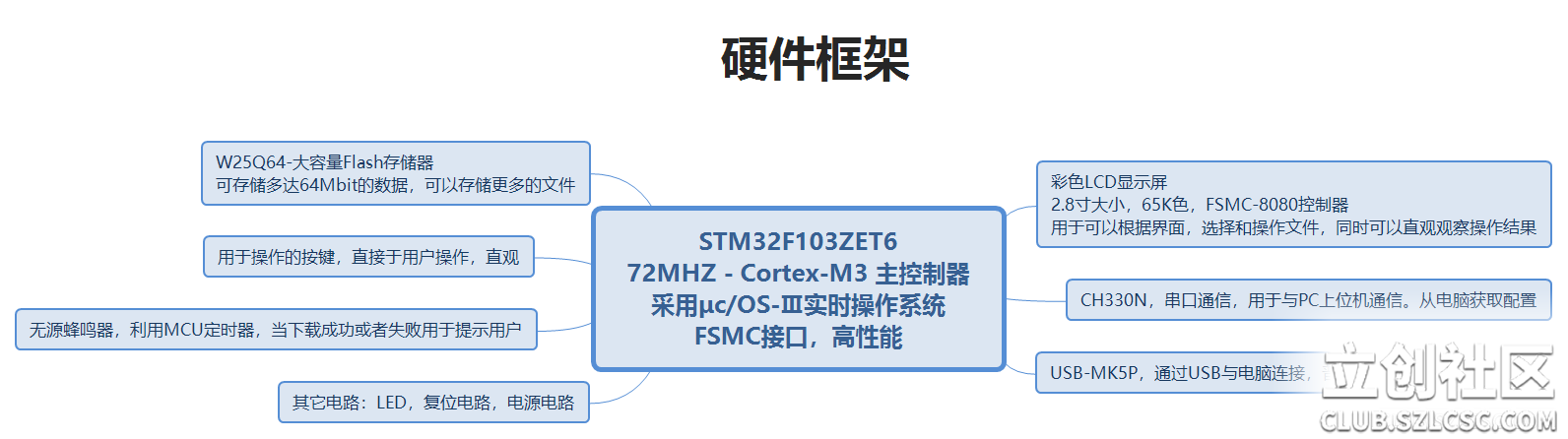
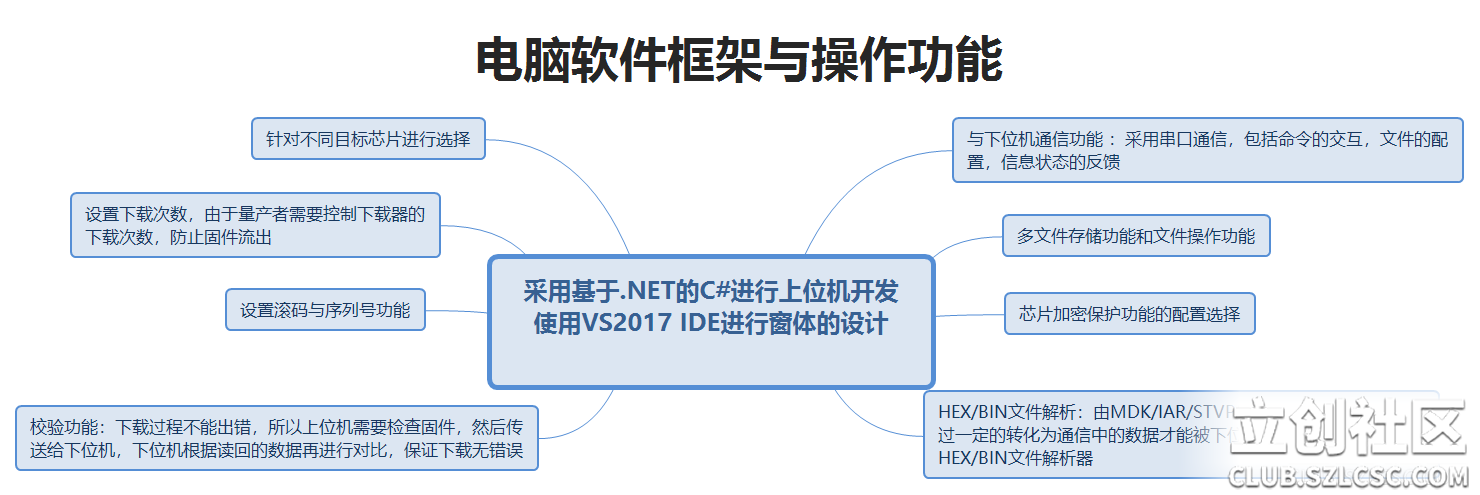
二、系统构架图
用流程图或思维导图等形式,描述您的作品的组成构架,即方案图。
三、硬件部分的描述
1.附上原理图&PCB实物图的图片或者源文件(官方建议大家尽量用源文件上传),如果是图片,请确保图片是清晰可辨的;
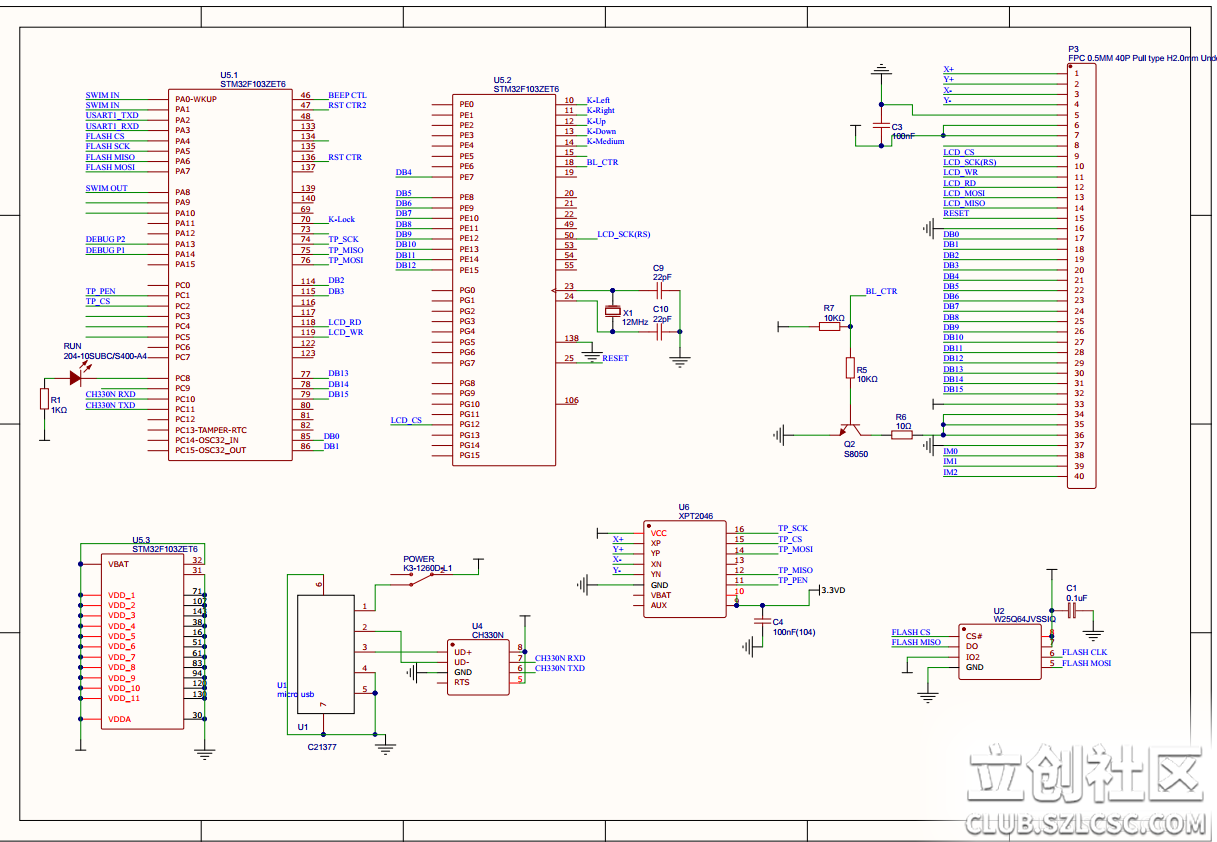
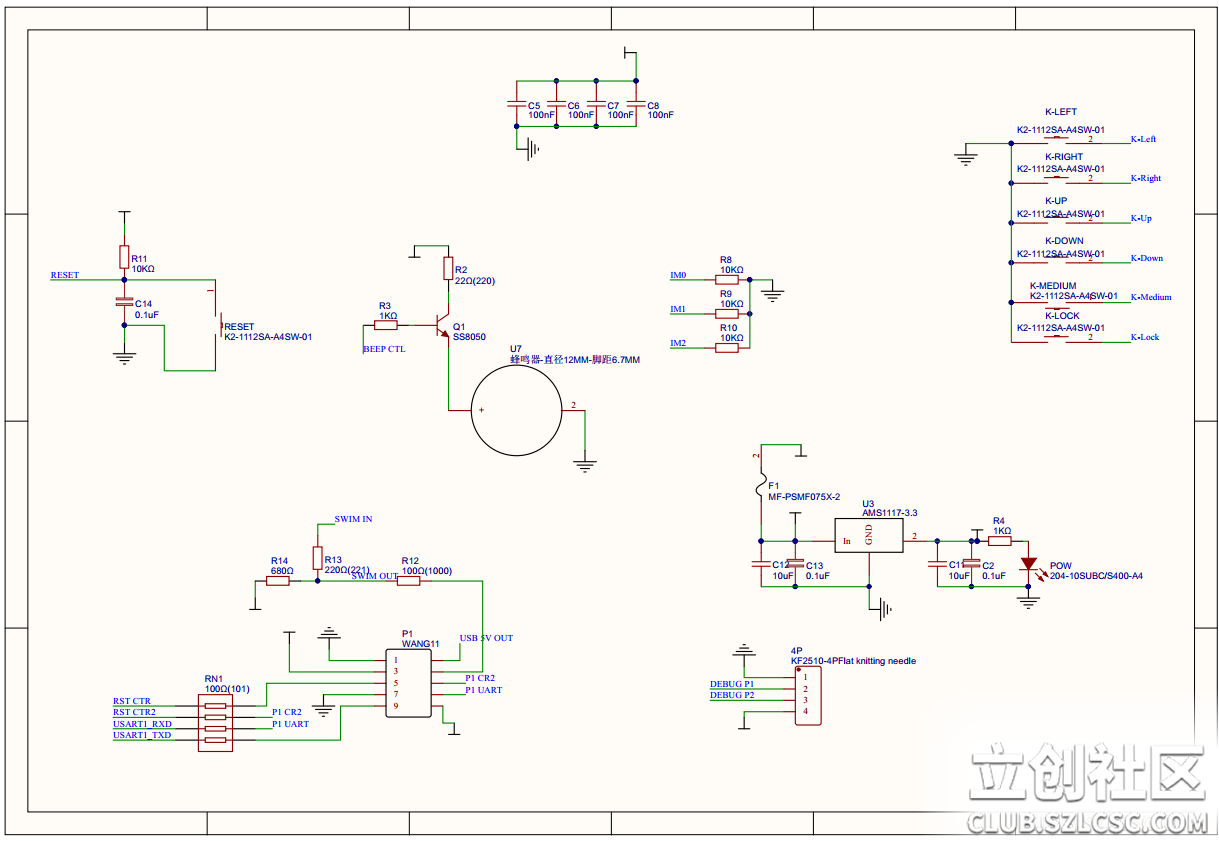
2.用文字把该作品的实现原理、系统的工作过程大致讲解一下。
本离线下载器,主要是基于SWD(Serial Wire Debug)串行调试接口,用于连接ARM内核的芯片,同时基于SWIM( single wire interface module )单线调试模块。
一):SWD接口,当前基于Cortex-M内核的STM32系列应用非常广泛,其中有集成了SWD调试接口,利用该调试接口可以访问芯片内部的总线上寄存器和芯片内核,当然也可以利用此方法方法进行更新Flash程序。其中SWD主要应用框架如下:通过SWD接口用于访问其中的DP端口,再通过DP端口访问其AP端口,通过AP端口再进行系统总线的访问,从而达到程序下载的目的。
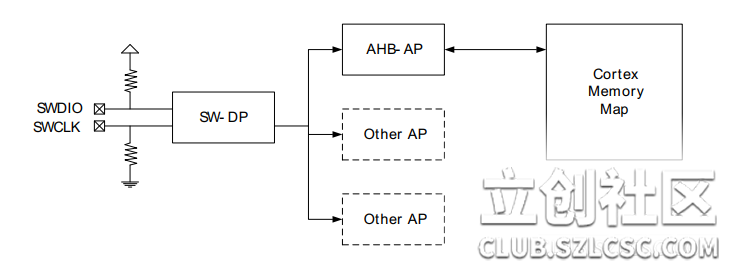
图1 - SWD接口
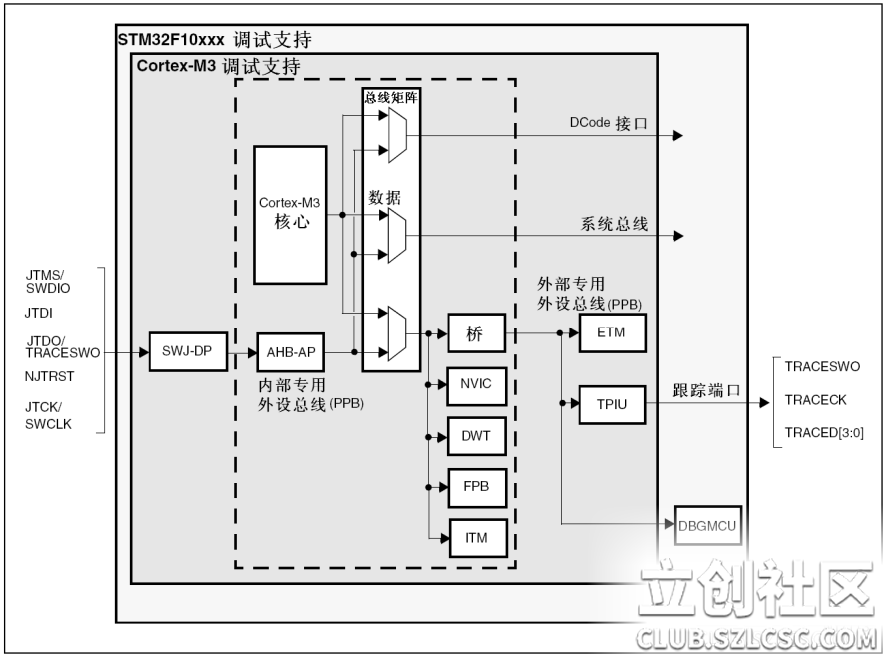
图2:STM32调试单元
SWD具体操作请求:SWD命令的开始是由8位启动,含义如图3,起始位+AP/DP选择位+读/写位 + 两位地址位 + 奇偶检验位 + 停止位 + 固定为1的校验位
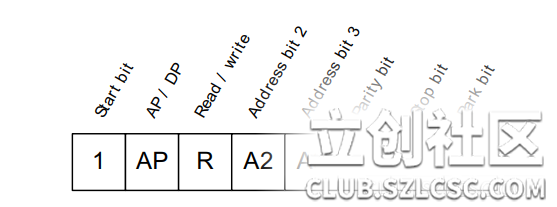
图3:SWD起始命令
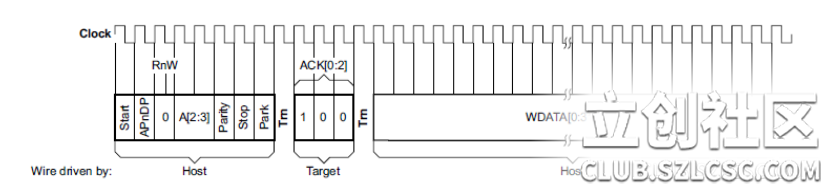
图4:读写序列
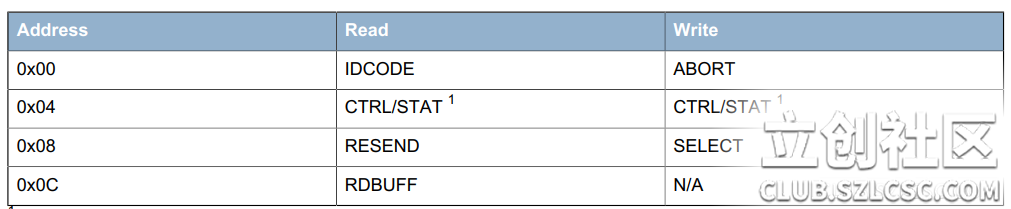
图5,读写序列
二):SWIM接口,SWIM是专用于STM8系列的调试接口,仅仅用到一根线就可以完成调试与仿真,这也是由于STM8定位主要是小的单片机,和高性价比。其SWIM接口主要框图如下:
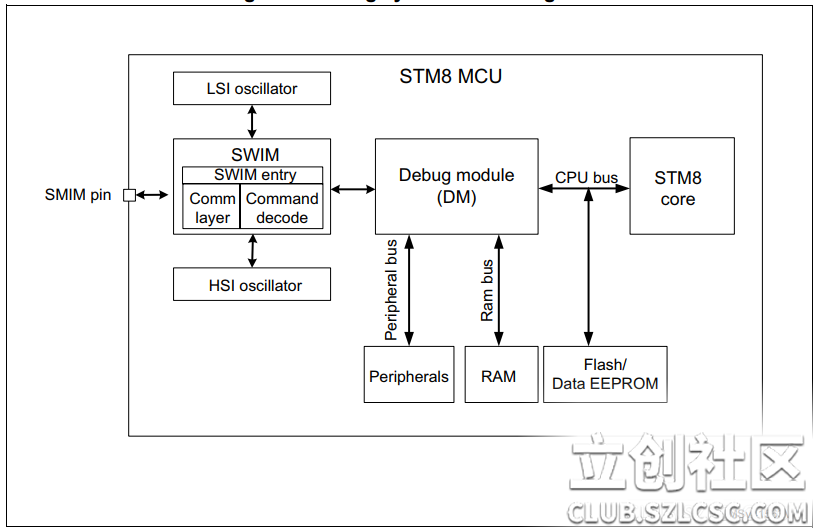
图6:SWIM调试接口框图
由于SWIM为单线模式,所以其对时间要求非常高,其时序图如下:为此在代码中特意使用了定时器才能满足这样的操作。
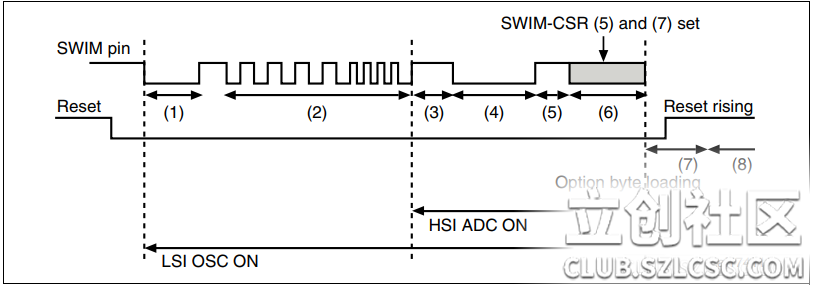
图7:SWIM时序图
3.注明所用到的EDA工具软件名称并附上设计链接。
本次EDA工具使用的是:立创EDA,开源的链接如下:
https://lceda.cn/lengyu1226/wang1111
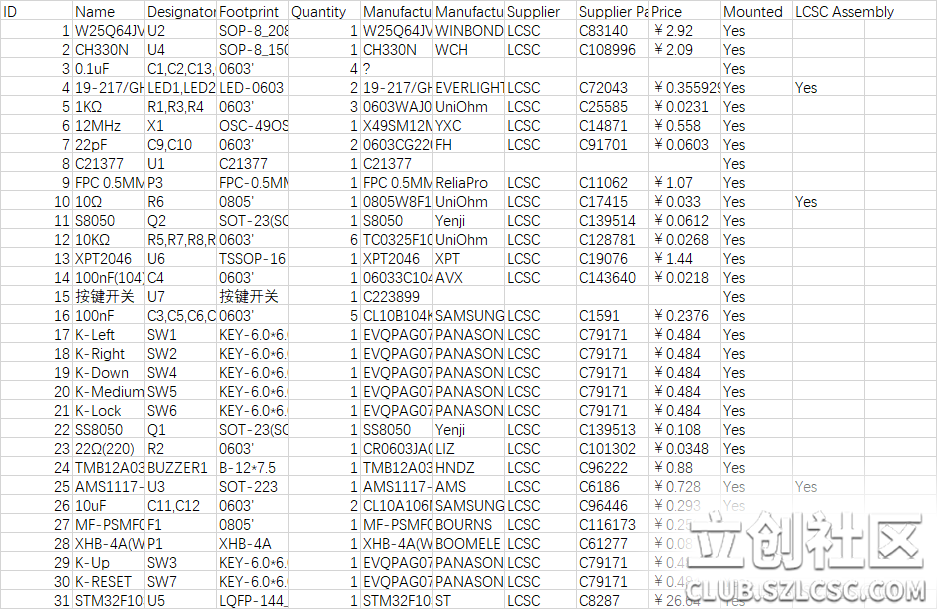
四、材料清单(BOM列表)
列出您这个作品所用到的主要器件(关键器件即可),比如单片机&ARM芯片、专用集成芯片(ASIC)、传感器、功能模块等。
如果所列出的芯片是来自我们立创商城上的,最好能写出该器件的商品编号或附上对应购买链接。
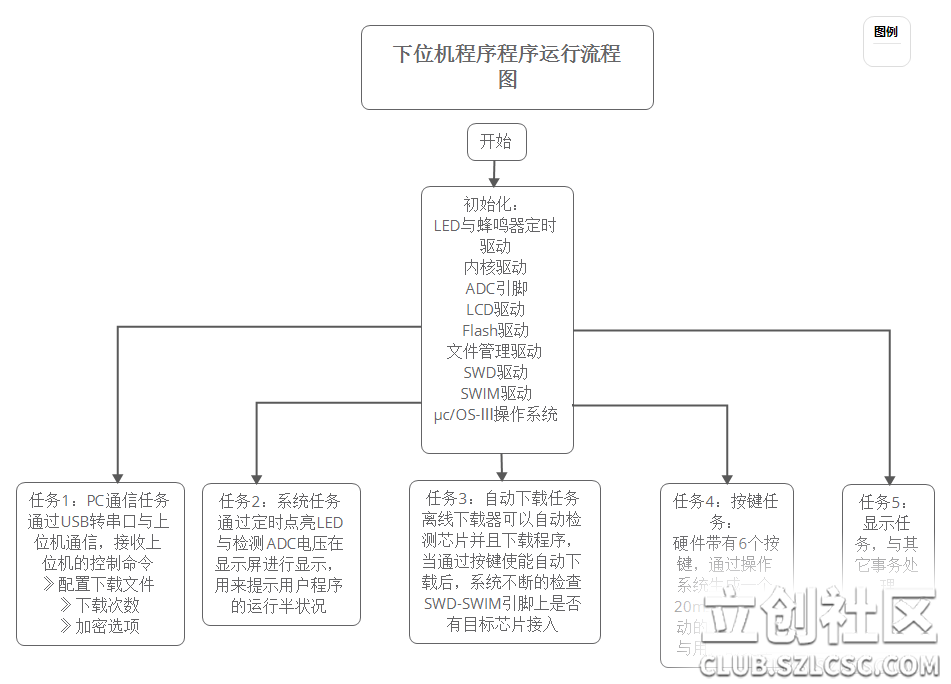
五、软件部分的描述(选填)
如果您的作品涉及到软件,请列出作品对应的软件工作流程图,及关键部分的例程、源码(如果您想开源的话请上传全部源码)。
上位机软件截图:


一):由于代码量巨大,贴出部分核心代码,下面为SWD控制的核心代码
/**
* @B 可以理解为TurnAround
*
*/
void SWDIO_CYCLE( void )
{
if( slowModeEnable == ENABLE)
{
SWD_Delay();
SWD_SWDIO_PIN_OUT = 0;
SWD_Delay();
SWD_SWDIO_PIN_OUT = 1;
SWD_Delay();
}
else
{
SWD_SWDIO_PIN_OUT = 0;
SWD_SWDIO_PIN_OUT = 1;
}
}
/**
* @B 从AP或者DP寄存器里读出数据
* reg:显然只有4个(暂定的取值范围0-3)。 data为什么用指针,因为这样才能改变传递值,也就是指针指向的值
* 结尾后:SWCLK保持为1
*/
u32 readReg( u8 APnDPReg,u8 reg, u32 *data )
{
u8 i = 0;
u8 cb = 0; //
u8 parity; // 校验值
u8 b = 0; // 用于读ACK的位
u8 ack = 0; // ACK的值
u8 ret = SWD_ERROR_OK;
*data = 0;
int _APnDPReg = (int) APnDPReg;
int _read = (int) 1; // 读请求值为1
u8 A2 = reg & 0x01;
u8 A3 = ( reg>>1 ) & 0x01;
parity = ( _APnDPReg + _read + A2 + A3 ) & 0x01;
SWD_SWDIO_MODE_OUT; // 设置为输出模式
// SWD_SWDIO_DIR_CTR2 = BUFFER_IC_DIR_OUT; // 缓冲器设置为输出模式
{ // 启动发送序列
// 发送序列的问题:发送后,可以看出,其中SWCLK保持为1:
WRITE_BIT( 1 );
WRITE_BIT( _APnDPReg );
WRITE_BIT( _read );
WRITE_BIT( A2 );
WRITE_BIT( A3 );
WRITE_BIT( parity );
WRITE_BIT( 0 );
WRITE_BIT( 1 ); // SWDIO = 1, SWCLK = 0, SWCLK = 1
}
{ // TurnAround
{
SWD_SWDIO_MODE_IN; // 设置为输入模式
// SWD_SWDIO_DIR_CTR2 = BUFFER_IC_DIR_IN; // 缓冲器设置为输入模式
}
SWCLK_CYCLE();
}
{ // 读ACK
for( i=0;i<3;i++ )
{
b = READ_BIT( );
ack |= b<<i;
}
// 按照我的理解,这里不是应该有一个Trn的么?但是却没有
}
{ // 判断ACK位
if( ack == ACK_OK )
{
for( i=0;i<32;i++)
{
b = READ_BIT( );
*data |= b<<i;
if(b)
cb = !cb; // cb之前已经初始化了
}
parity = READ_BIT(); // 最后再读一下校验位
// 要使系统稳定的话,处理错误至关重要
if( cb == parity )
{
ret = SWD_ERROR_OK; // 系统正常
}
else
{
ret = SWD_ERROR_PARITY; // 校验错误,检验错误就可能是位操作不对,当然这个概率是50%
}
}
else if( ack == ACK_WAIT )
{
ret = SWD_ERROR_WAIT;
}
else if( ack == ACK_FAULT )
{
ret = SWD_ERROR_FAULT;
}
else
{
ret = SWD_ERROR_PROTOCOL; //协议出错,这个要注意了
}
}
{ // Turnaround
SWCLK_CYCLE();
}
{ // 进入8个Idle状态,确保传输
{
SWD_SWDIO_MODE_OUT; // 设置为输入模式
// SWD_SWDIO_DIR_CTR2 = BUFFER_IC_DIR_OUT; // 缓冲器设置为输入模式
}
for( i=0;i<8;i++ )
{
WRITE_BIT(0);
}
}
return ret; // 返回值
}
/**
* @B 这里有个要注意:可以忽视Ack,因为清除错误需要访问内容寄存器
*
*/
u32 writeReg( u8 APnDPReg,u8 reg,u32 data,u8 ignoreAck)
{
u8 ack = 0;
u8 i;
u8 parity = 0;
u8 b;
u8 ret = SWD_ERROR_OK;
u8 _APnDPReg = APnDPReg;
u8 _read = 0;
u8 A2 = reg&0x1;
u8 A3 = (reg>>1)&0x1;
parity = ( _APnDPReg + _read +A2 + A3 )&0x1; // 计算校验值
SWD_SWDIO_MODE_OUT; // 设置为输出模式
// SWD_SWDIO_DIR_CTR2 = BUFFER_IC_DIR_OUT; // 缓冲器设置为输出模式
{ // 启动发送序列
// 发送序列的问题:发送后,可以看出,其中SWCLK保持为1:
WRITE_BIT( 1 );
WRITE_BIT( _APnDPReg );
WRITE_BIT( _read );
WRITE_BIT( A2 );
WRITE_BIT( A3 );
WRITE_BIT( parity );
WRITE_BIT( 0 );
WRITE_BIT( 1 ); // SWDIO = 1, SWCLK = 0, SWCLK = 1 (这个由主机驱动为1的!手册说是不用主机驱动,但是由于上拉总线上会为1)
}
{
{ // 发现一个特别奇葩的问题:就是如果把这一句,放到SWCLK_CYCLE();之后就会出现:ACK错误,比较费解!
// 可能的原因:就是从机这个时候要驱动SWDIO,但是发现驱动不下来!!
// 最好的解决办法:就是通过读DP寄存器找到这个问题!
SWD_SWDIO_MODE_IN;
// SWD_SWDIO_DIR_CTR2 = BUFFER_IC_DIR_IN;
}
SWCLK_CYCLE();
}
{
{
// 读ACK
for( i=0;i<3;i++ )
{
b = READ_BIT( );
ack |= b<<i;
}
// 按照我的理解,这里不是应该有一个Trn的么?但是却没有,(最后发现读是没有的人,但是写是有的!写的在下面)
}
}
{ //
if( (ack == ACK_OK) || ignoreAck )
{
{ // 设置为输出
SWD_SWDIO_MODE_OUT; // 设置为输出模式
// SWD_SWDIO_DIR_CTR2 = BUFFER_IC_DIR_OUT; // 缓冲器设置为输出模式
}
SWCLK_CYCLE(); // 写的时候要用Trn一次。但是读的时候没有在代码里面看到。
parity = 0; // 这个函数有问题,当我改parity的时候,出现可以读状态,说明给器件的值存在检验错误!!这个是不应该的。这个要检查!
for( i=0;i<32;i++ )
{
b = ( data >> i)&0x1;
WRITE_BIT(b);
if(b)
parity = !parity;
}
WRITE_BIT(parity);
}
else if( ack == ACK_WAIT )
{
ret = SWD_ERROR_WAIT;
}
else if( ack == ACK_FAULT )
{
ret = SWD_ERROR_FAULT;
}
else
{
ret = SWD_ERROR_PROTOCOL; //协议出错,这个要注意了
}
{ // 进入8个Idle状态,确保传输,这个可以优化!
{ // 这个其实是多余的,一直是输出的,所以我都考虑这个源代码的性能了。
SWD_SWDIO_MODE_OUT; // 设置为输入模式
// SWD_SWDIO_DIR_CTR2 = BUFFER_IC_DIR_OUT; // 缓冲器设置为输入模式
}
for( i=0;i<8;i++ )
{
WRITE_BIT(0);
}
}
}
return ret;
}
/**
* @B 上电执行JTAG转SWD的序列函数!
*
*/
void JTAG_To_SWD_Sequence( void )
{
int i;
int b;
SWD_SWDIO_MODE_OUT; // 设置为输出模式
// SWD_SWDIO_DIR_CTR2 = BUFFER_IC_DIR_OUT; // 缓冲器设置为输出模式
{
SWD_SWDIO_PIN_OUT = 1; // 先输出为1
for( i=0;i<80;i++ )
{
SWCLK_CYCLE();
}
}
for( i=0;i<16;i++ )
{
b = ( JTAG_TO_SWD_VALUE>>i )&0x1;
WRITE_BIT(b);
}
{
SWD_SWDIO_PIN_OUT = 1;
for( i=0;i<60;i++ )
{
SWCLK_CYCLE();
}
}
{ // 执行16个空闲周期
SWD_SWDIO_PIN_OUT = 0;
for( i=0;i<16;i++ )
{
SWCLK_CYCLE();
}
}
二):下面是SWIM的核心代码
static void SWIM_Init()
{
if (!SWIM_Inited)
{
SWIM_Inited = 1;
SYNCSWPWM_OUT_TIMER_INIT(0);
SYNCSWPWM_PORT_OD_INIT(); //端口切换到第二功能输出口
}
}
static void SWIM_Fini()
{
SYNCSWPWM_PORT_ODPP_FINI();
SYNCSWPWM_OUT_TIMER_FINI();
SYNCSWPWM_IN_TIMER_FINI();
SWIM_Inited = 0;
}
static void SWIM_EnableClockInput(void)
{
SWIM_clock_div = 0;
SYNCSWPWM_IN_TIMER_INIT();
}
static uint8_t SWIM_EnterProgMode(void)
{
uint8_t i;
uint32_t dly;
SYNCSWPWM_IN_TIMER_RISE_DMA_INIT(10, SWIM_DMA_IN_Buffer); //分配DMA存储空间
SWIM_LOW();
System_Delay_us(1000);
for (i = 0; i < 4; i++)
{
SWIM_HIGH();
System_Delay_us(500);
SWIM_LOW();
System_Delay_us(500);
}
for (i = 0; i < 4; i++)
{
SWIM_HIGH();
System_Delay_us(250);
SWIM_LOW();
System_Delay_us(250);
}
SWIM_HIGH();
dly = SWIM_MAX_DLY;
SYNCSWPWM_IN_TIMER_RISE_DMA_WAIT(dly);
if (!dly)
{
return 1;
}
else
{
return 0;
}
}
static u8 SWIM_HW_In(u8* data, u8 bitlen)
{
u8 ret = 0;
u32 dly;
dly = SWIM_MAX_DLY;
SYNCSWPWM_IN_TIMER_RISE_DMA_WAIT(dly); //先接收引导bit,目标到主机,这个位必须是1
*data = 0;
if (dly && (SWIM_DMA_IN_Buffer[1] < SWIM_PULSE_Threshold)) //如果=1,低电平时间小于4个脉冲
{
for (dly = 0; dly < 8; dly++)
{
if (SWIM_DMA_IN_Buffer[2 + dly] < SWIM_PULSE_Threshold)
{
*data |= 1 << (7 - dly);
}
}
SYNCSWPWM_IN_TIMER_RISE_DMA_INIT(11, SWIM_DMA_IN_Buffer);
SWIM_DMA_OUT_Buffer[0] = SWIM_PULSE_1;
SWIM_DMA_OUT_Buffer[1] = 0;
SYNCSWPWM_OUT_TIMER_DMA_INIT(2, SWIM_DMA_OUT_Buffer);
SYNCSWPWM_OUT_TIMER_DMA_WAIT();
}
else
{
ret = 1;
}
return ret;
}
static uint8_t SWIM_SRST(void)
{
return SWIM_HW_Out(SWIM_CMD_SRST, SWIM_CMD_BITLEN, SWIM_MAX_RESEND_CNT);
}
static uint8_t SWIM_WOTF(uint32_t addr, uint16_t len, uint8_t *data)
{
uint16_t processed_len;
uint8_t cur_len, i;
uint32_t cur_addr, addr_tmp;
u8 rtv2;
if ((0 == len) || ((uint8_t*)0 == data))
{
return 1;
}
processed_len = 0;
cur_addr = addr;
while (processed_len < len)
{
if ((len - processed_len) > 255)
{
cur_len = 255;
}
else
{
cur_len = len - processed_len;
}
SET_LE_U32(&addr_tmp, cur_addr);
if(SWIM_HW_Out(SWIM_CMD_WOTF, SWIM_CMD_BITLEN, SWIM_MAX_RESEND_CNT))
{
return 1;
}
if (SWIM_HW_Out(cur_len, 8, 0))
{
return 2;
}
rtv2=SWIM_HW_Out((addr_tmp >> 16) & 0xFF, 8, 0); //retry=0,出错后不重发
if (rtv2)
{
return 3;
}
if (SWIM_HW_Out((addr_tmp >> 8) & 0xFF, 8, 0))
{
return 4;
}
if (SWIM_HW_Out((addr_tmp >> 0) & 0xFF, 8, 0))
{
return 5;
}
for (i = 0; i < cur_len; i++)
{
if (SWIM_HW_Out(data[processed_len + i], 8, SWIM_MAX_RESEND_CNT))
{
return 6;
}
}
cur_addr += cur_len;
processed_len += cur_len;
}
return 0;
}
static uint8_t SWIM_ROTF(uint32_t addr, uint16_t len, uint8_t *data)
{
uint16_t processed_len;
uint8_t cur_len, i;
uint32_t cur_addr, addr_tmp;
if ((0 == len) || ((uint8_t*)0 == data))
{
return 7;
}
processed_len = 0;
cur_addr = addr;
while (processed_len < len)
{
if ((len - processed_len) > 255)
{
cur_len = 255;
}
else
{
cur_len = len - processed_len;
}
SET_LE_U32(&addr_tmp, cur_addr);
if(SWIM_HW_Out(SWIM_CMD_ROTF, SWIM_CMD_BITLEN, SWIM_MAX_RESEND_CNT))
{
return 6;
}
if (SWIM_HW_Out(cur_len, 8, 0))
{
return 5;
}
if (SWIM_HW_Out((addr_tmp >> 16) & 0xFF, 8, 0))
{
return 4;
}
if (SWIM_HW_Out((addr_tmp >> 8) & 0xFF, 8, 0))
{
return 3;
}
if (SWIM_HW_Out((addr_tmp >> 0) & 0xFF, 8, 0))
{
return 2;
}
for (i = 0; i < cur_len; i++)
{
if (SWIM_HW_In(&data[processed_len + i], 8))
{
return 1;
}
}
cur_addr += cur_len;
processed_len += cur_len;
}
return 0;
}
六、作品演示
请上传您的作品的功能演示到腾讯视频,并编辑到本楼(或附上视频链接)。按要求上传视频可获得10分,具体详见活动规则。
一共录制了两个视频,第一个视频详细演示了离线下载器操作过程与说明时间较长,第二个相对简单的演示了整个操作流程。
1): http://url.cn/5ZQU77A?sf=uri
2):http://url.cn/5OXUQgP?sf=uri
七、总结
例如您在完成该作品过程中的一些体会、碰到的技术问题或调试经验、作品的未来规划,及对我们主办方的建议和意见等。
- 在进行开发的过程中使用了立创EDA一共设计了三款PCB,第一个因为外形不够,第二个测试过程中发现几处不合理,经过三次的更改最终成型。
- 需要支持更多的芯片类型,当前下载器可以支持STM32与STM8系列,但是为了日后能够推广,需要支持更多的芯片,这样一个下载器在手上,可以进行多种类型的芯片的下载,而不用多套设备
- SWD/SWIM调试阶段比较难懂,尤其是对于协议部分,但是如何仔细阅读,深刻理解其中的含义,最后发现也比较简单,所以遇到开发的难题时候,要迎难而上。
八:相关资料下载:
1:串口通信协议.zip
2:ARM Debug Interface v5 Architecture Specification.zip
3:CD00226555.zip
4:en.CD00173911.pdf.zip
5:en.CD00191343.pdf.zip




 返回列表
返回列表


 发表于2018-05-09 11:10:41
发表于2018-05-09 11:10:41




 回复
回复
 收藏
收藏
 举报
举报

