前几天没什么事,就准备自己做一个写字机器人,初期查了一些资料,但是楼主还是想了一些创新
例如“运用极坐标来制作” PS:传统的写字机器人都是用的直角坐标
首先去超市选了一款儿童玩具,如下图
相信好多人都见过,之所以选这个的原因是,这种绘图板擦写很方便
以后调试的时候会省很多事,如果用A4纸太浪费了
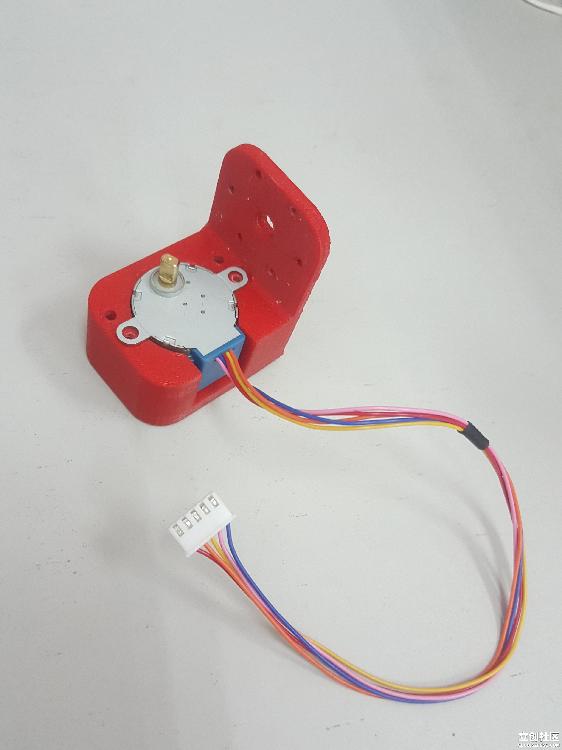
然后就是选用电机了,为了控制精准,我选用的是舵机搭配步进电机
之所以选择5V的步进电机也是为了方便控制,仅仅一个ULN2003驱动芯片就可以搞定
电机舵机都选好就剩下主控芯片了,首选Arduino无疑了,这里用的是最经典的UNO
硬件电路选好以后还要考虑运动机构了,这对河南科技大学机电学院的学生来说简直小菜一碟,洛阳工学院的历史沉淀也不是吹的
皮带、丝杠、齿轮齿条三种最常用的,当然是丝杆最合适了,不过网上其他人做都是用的同步带
因为小编的材料费完全是从伙食费里面省出来的,所以说什么同步带都是有钱人玩的
去五金店五块钱买了一根1M长的丝杠完事,直径M4,另外还买了一根直径是3mm的光轴
材料都准备齐了,剩下的就该设计了
对大学生来说,最好用的设计软件当然非Solidworks莫属了
零件图,装配图,工程图,一波操作后大致雏形出来了
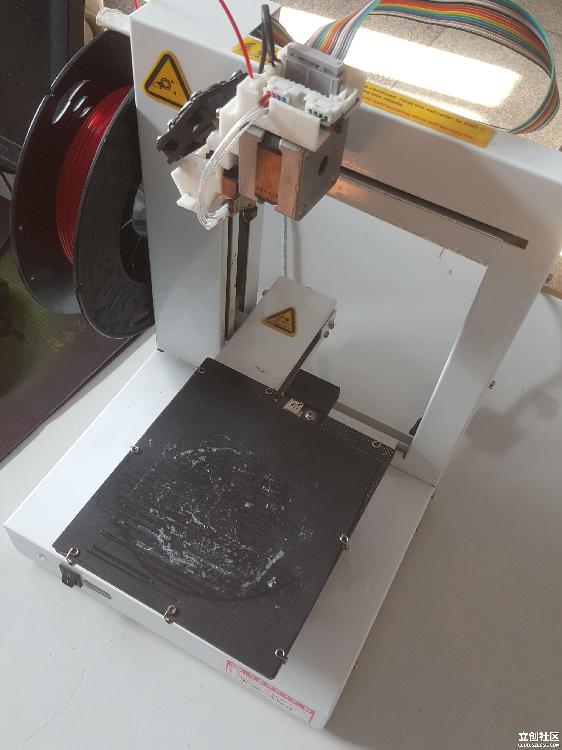
首先用3D打印给步进电机加个座
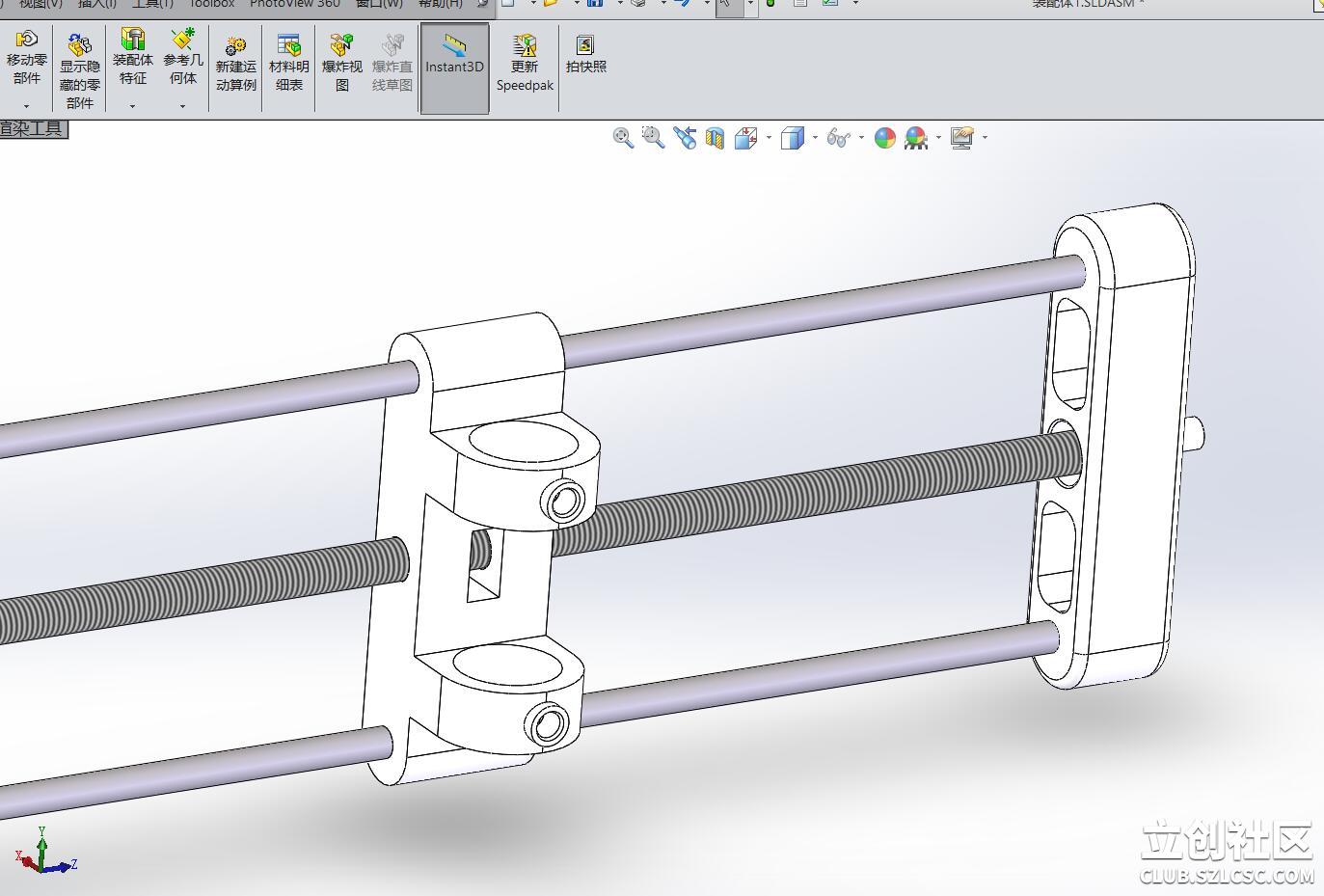
下面是软件绘制的模型图
中间的是用来装笔的,右边用来固定光轴




 返回列表
返回列表


 发表于2018-11-23 13:20:02
发表于2018-11-23 13:20:02







 回复
回复
 收藏
收藏
 举报
举报