



 返回列表
返回列表
|
查看:
25197
回复: 21 |
自己动手做一个写字机器人
|
|||


小小宅138
13
主题
42
回复 |
1#
电梯直达

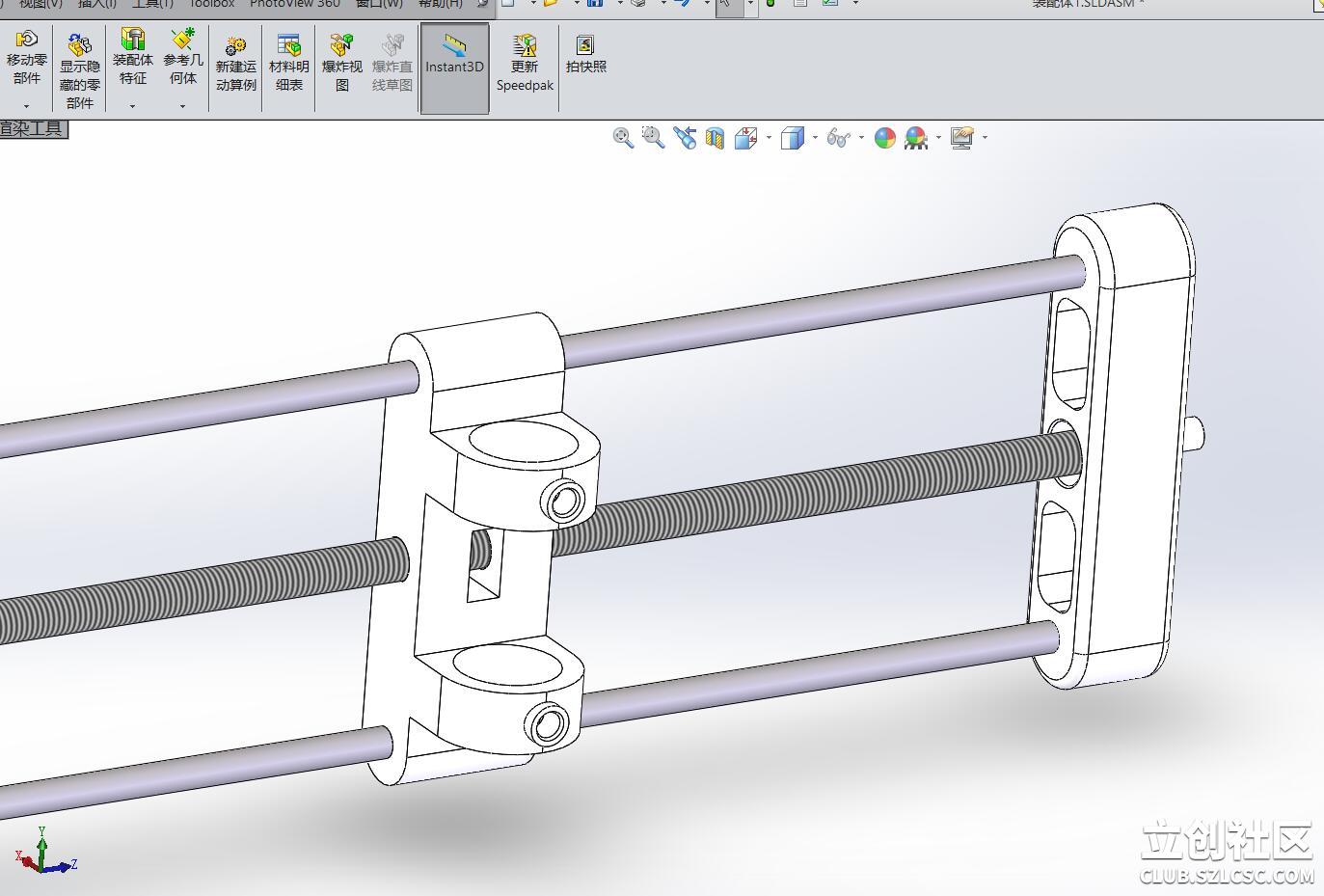
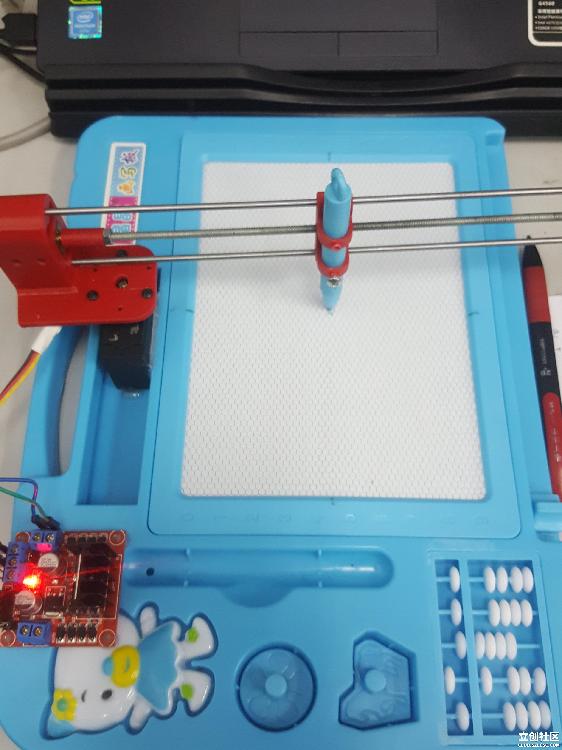
前几天没什么事,就准备自己做一个写字机器人,初期查了一些资料,但是楼主还是想了一些创新 例如“运用极坐标来制作” PS:传统的写字机器人都是用的直角坐标 首先去超市选了一款儿童玩具,如下图 相信好多人都见过,之所以选这个的原因是,这种绘图板擦写很方便 以后调试的时候会省很多事,如果用A4纸太浪费了 然后就是选用电机了,为了控制精准,我选用的是舵机搭配步进电机 之所以选择5V的步进电机也是为了方便控制,仅仅一个ULN2003驱动芯片就可以搞定 电机舵机都选好就剩下主控芯片了,首选Arduino无疑了,这里用的是最经典的UNO 硬件电路选好以后还要考虑运动机构了,这对河南科技大学机电学院的学生来说简直小菜一碟,洛阳工学院的历史沉淀也不是吹的 皮带、丝杠、齿轮齿条三种最常用的,当然是丝杆最合适了,不过网上其他人做都是用的同步带 因为小编的材料费完全是从伙食费里面省出来的,所以说什么同步带都是有钱人玩的 去五金店五块钱买了一根1M长的丝杠完事,直径M4,另外还买了一根直径是3mm的光轴 材料都准备齐了,剩下的就该设计了 对大学生来说,最好用的设计软件当然非Solidworks莫属了 零件图,装配图,工程图,一波操作后大致雏形出来了 首先用3D打印给步进电机加个座 下面是软件绘制的模型图 中间的是用来装笔的,右边用来固定光轴 
单片机小白
|
|||
|
小小宅138
13
主题
42
回复 |
2#
上面的设计图打印出来就是这样了 步进电机和舵机的位置如下图
单片机小白
|
|||
|
小小宅138
13
主题
42
回复 |
3#
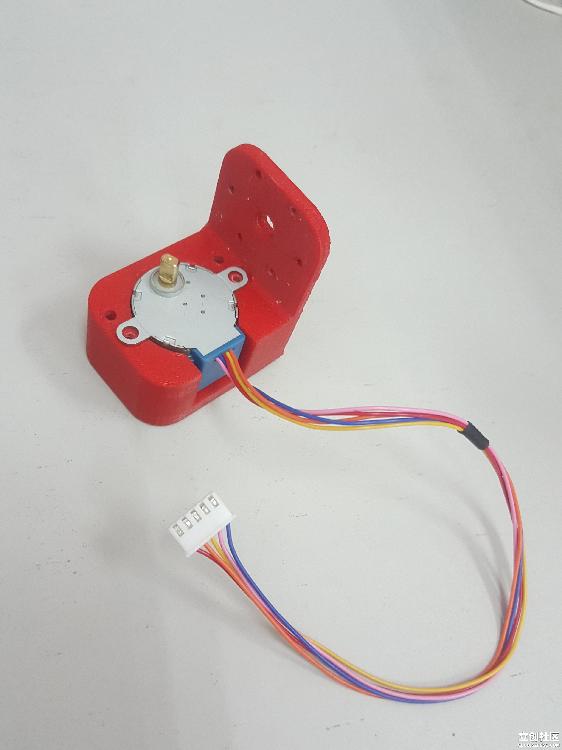
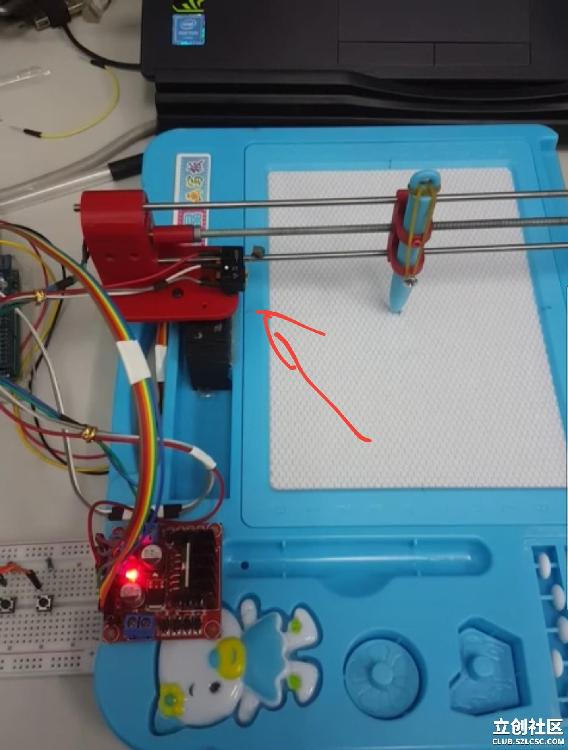
通上电试了一下运动速度,发现舵机的速度还可以,但是步进电机就不行了 因为步进电机的速度本来就慢,再加上用的丝杠机构,速度更是慢的离谱 所以,小编又咬咬牙买了个直流减速电机,如下图 淘宝买来的,不到二十,还包邮
单片机小白
|
|||
|
小小宅138
13
主题
42
回复 |
4#
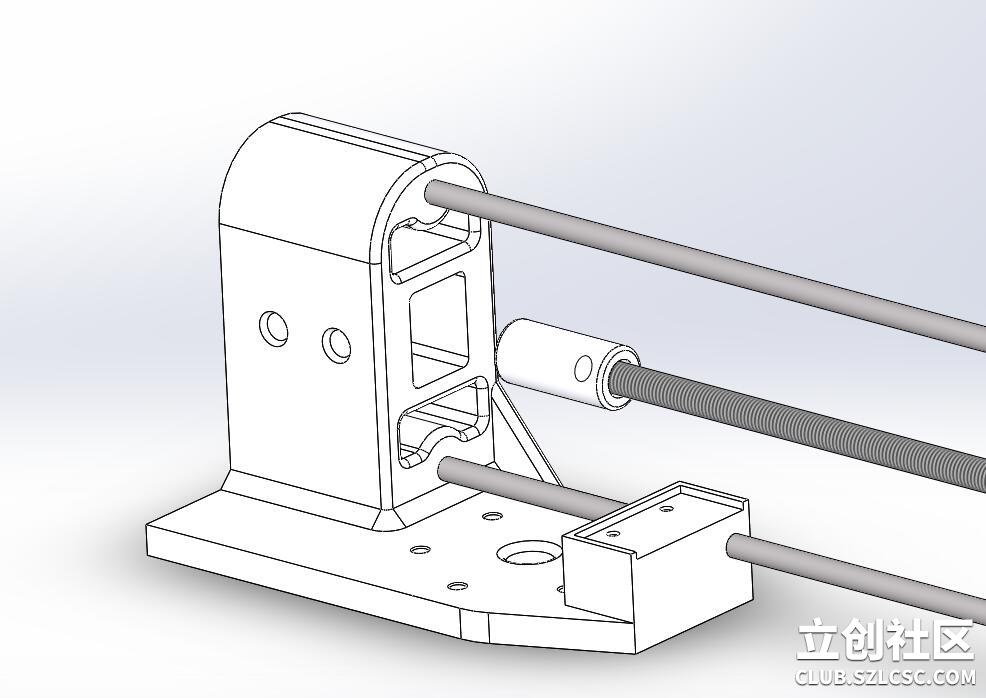
换了直流电机,电机的座子、联轴器都要重新设计
单片机小白
|
|||
|
小小宅138
13
主题
42
回复 |
5#
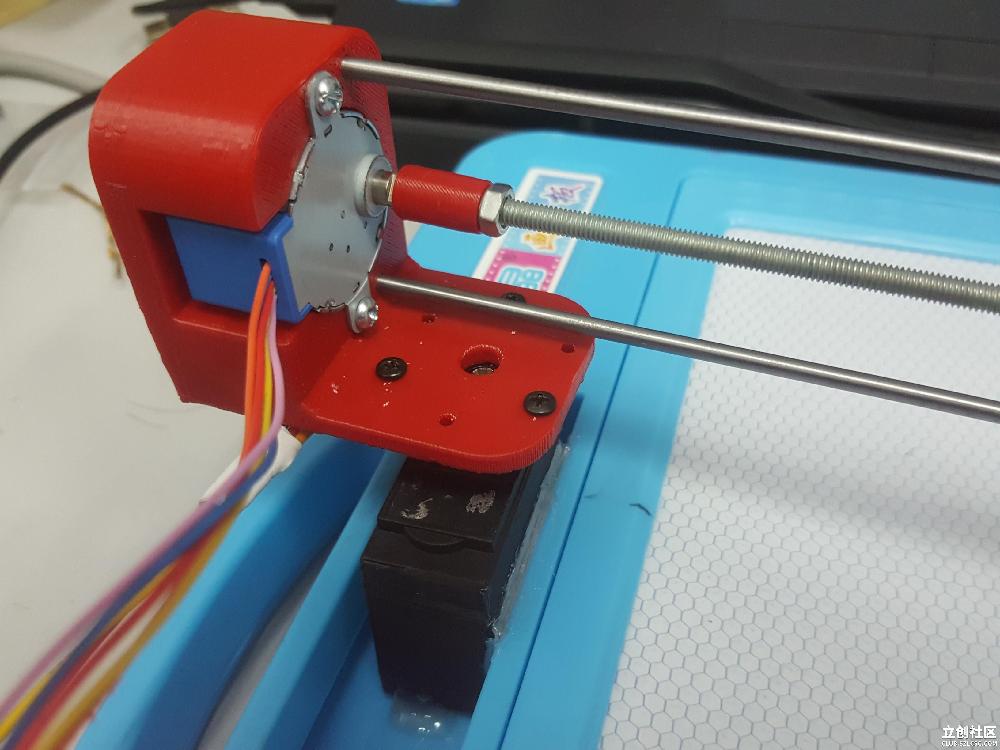
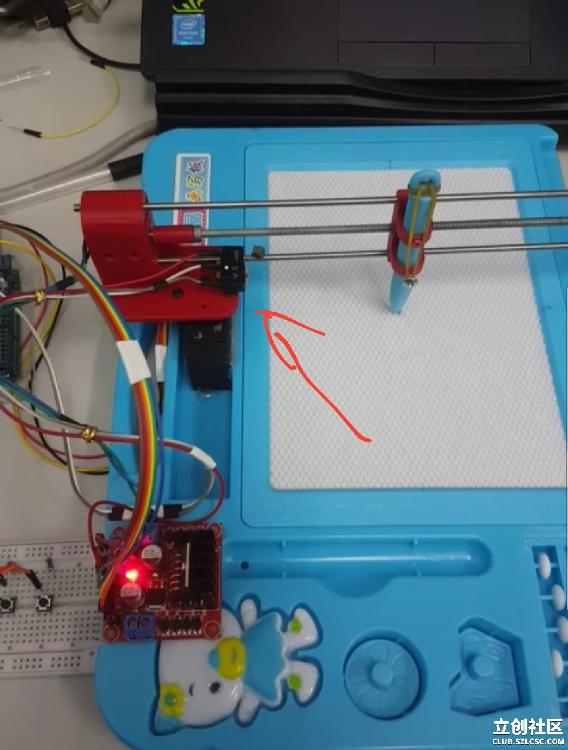
座子打印完成,装配完的效果 因为单片机的电流无法驱动直流电机,所以加了一块L298N直流电机驱动 上图左下角就是了
单片机小白
|
|||
|
小小宅138
13
主题
42
回复 |
6#
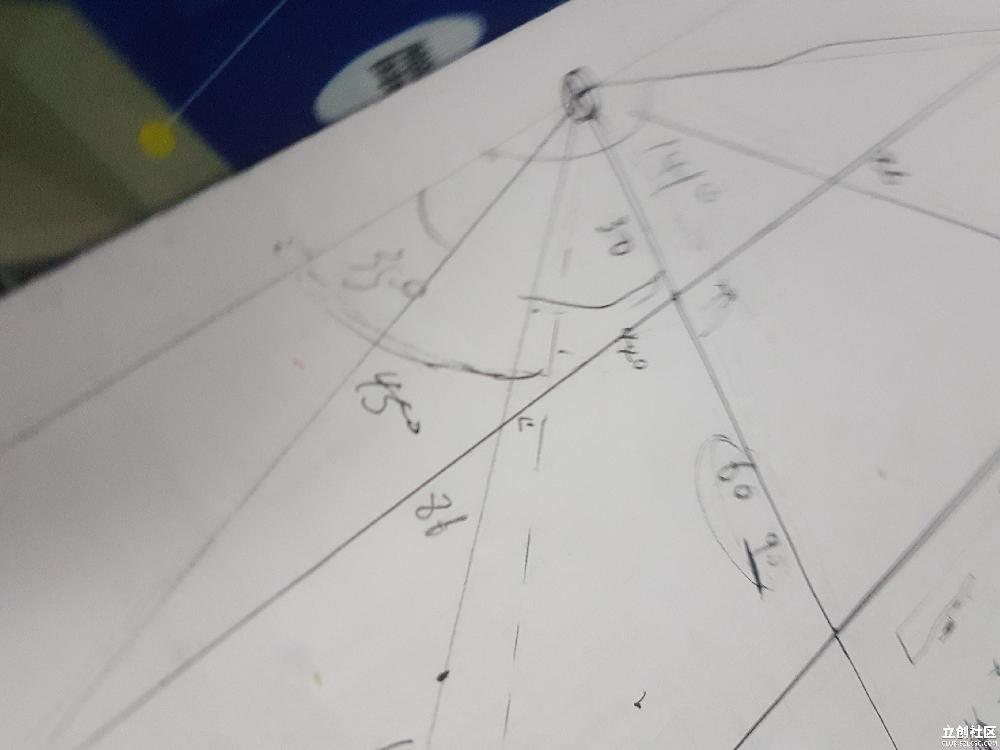
为了编程方便,构建一个极坐标系,下面开始烧脑了,苦逼的计算过程开始了
单片机小白
|
|||
|
小小宅138
13
主题
42
回复 |
7#
单片机小白
|
|||
 立创EDA罗工
立创EDA罗工
78
主题
4623
回复 |
8#
厉害厉害。好厉害呢。
技术支持微信:请前往lceda.cn获取二维码,官方群:不再提供QQ群,公众号:立创EDA 或 开源硬件平台
|
|||
|
小小宅138
13
主题
42
回复 |
9#
还在完善中
单片机小白
|
|||
|
小小宅138
13
主题
42
回复 |
10#
#include <Servo.h>
#include <Math.h>
Servo myservo;
int i = 87;//舵机中间位置 i为舵机位置指示参数
int x=30; //笔位置(笔尖到转轴的距离)
int led = 13;//中断指示灯
int c=0;
int s=0;
int u=0;
int v=0;
volatile int state = 0;
void setup() {
pinMode(A1, OUTPUT);
pinMode(A2, OUTPUT);
pinMode(A3, OUTPUT);
pinMode(A4, OUTPUT);
pinMode(3, INPUT_PULLUP);
pinMode(4, INPUT_PULLUP);
pinMode(5, INPUT_PULLUP);
pinMode(6, INPUT_PULLUP);
pinMode(7, INPUT_PULLUP);
pinMode(8, INPUT_PULLUP);
pinMode(led, OUTPUT);
attachInterrupt(0, blink, CHANGE);
myservo.attach(9);
Serial.begin(9600);
}
void loop() {
//myservo.write(87);
//Serial.println(s);
begain();
shoudong();
//sanjiao();
delay(10);
//z87_78_114_91 ();
//z88_40_130_60 ();
h130_60_114_91 ();
}
void z87_78_114_91 ()
{
for(;s<1;s++)
{
for(int t=90;t<=114;t++)
{
int a=80.00/cos(PI*(t-90)*1.20/180.00)+0.5;
yundong(t-2,a);
Serial.print(t);Serial.print(" ");Serial.println(a);
delay(200);
}
}
}
void z88_40_130_60 ()
{
for(;s<1;s++)
{
for(int t=90;t<=130;t++)
{
int a=40.00/cos(PI*(t-90)*1.20/180.00)+0.5;
yundong(t-2,a);
Serial.print(t);Serial.print(" ");Serial.println(a);
delay(200);
}
}
}
void h130_60_114_91 ()
{
for(;u<1;u++)
{
for(int t=130;t>=114;t--)
{
int a=40.00/sin(PI*(t-90)*1.00/180.00);
yundong(t,a);
Serial.print(t);Serial.print(" ");Serial.println(a);
delay(200);
}
}
}
///////////////////////////////////////////////////////////////////////子程序///////////////////////////////////////////////
void begain()//回零点
{
for(;c<=1;c++)
{
myservo.write(i);
delay(100);
fanzhuan(120);
zhengzhuan(3);
x=30;
}
}
int yundong(int a,int l)//////////////////////////运动/////////////
{
if(l>x)
{
zhengzhuan(l-x);
}
else fanzhuan(x-l);
myservo.write(a);
delay(100);
i=a;//更新位置
x=l;
}
void shoudong()
{
myservo.write(i);
if (digitalRead(3) == LOW) {i++;delay(10);Serial.print(i);Serial.print(" ");Serial.print(x);Serial.println(" k1");}
if (digitalRead(4) == LOW) {i--;delay(10);Serial.print(i);Serial.print(" ");Serial.print(x);Serial.println(" k2");}
if (digitalRead(5) == LOW) {i = 87;delay(150);Serial.print(i);Serial.print(" ");Serial.print(x);Serial.println(" k3");}
if (digitalRead(6) == LOW) {yundong(87,78);Serial.println("4");}
if(state==0)
{
if (digitalRead(7) == LOW)
{
if(x>30)
{
fanzhuan(1);x--;Serial.print(" ");Serial.print(x);Serial.println(" k5");
}
}
if (digitalRead(8) == LOW)
{
zhengzhuan(1);x++;Serial.print(" ");Serial.print(x);Serial.println(" k6");
}
delay(10);
}
}
int zhengzhuan(int m)
{
for (; m >= 1; m--)//m是移动的距离,单位毫米
{
analogWrite(A1, 255);//1
analogWrite(A2, 0);
delay(210);
analogWrite(A1, 0);
delay(10);
}
}
int fanzhuan(int m)
{
for (; m >= 1; m--)
{
if(x<30)break;
analogWrite(A1, 0);
analogWrite(A2, 255);
delay(210);
analogWrite(A2, 0);
delay(10);
}
}
void blink()//中断函数
{
state = !state;
digitalWrite(led, state);
x=29;
}
单片机小白
|
|||
|
小小宅138
13
主题
42
回复 |
11#
为了安全起见程序中加入了一个限位,防止电机超程堵转
单片机小白
|
|||
|
小小宅138
13
主题
42
回复 |
12#
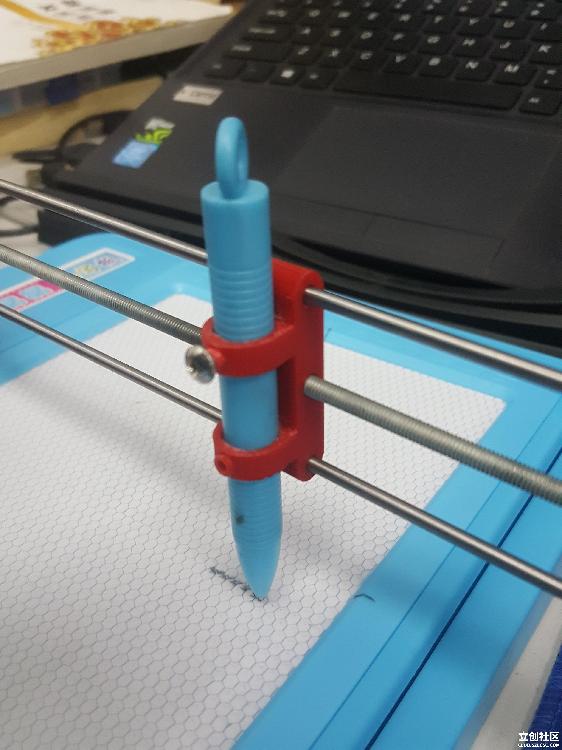
笔上面的皮筋是为了笔尖和画板始终接触 为了防止出现意外,在电机架上面加了一个限位开关,程序写在中断里面 只要笔架碰到限位,自动回零点(画板的中心)
单片机小白
|
|||
redleaves
4
主题
93
回复 |
13#
不能抬笔,只能一笔画?
|
|||
|
小小宅138
13
主题
42
回复 |
14#
后期会加舵机来抬笔,或者当初的想法是直接用电磁铁,因为笔尖本来就是一块磁铁,换成电磁铁就可以通过单片机控制了
单片机小白
|
|||
|
小小宅138
13
主题
42
回复 |
15#
目前走直线是没有问题了,简单写了一个画二极管的程序
单片机小白
|
|||
|
小小宅138
13
主题
42
回复 |
16#
单片机小白
|
|||
|
小小宅138
13
主题
42
回复 |
17#
这是我自己画的一个极坐标单位表,用来方便编程的
单片机小白
|
|||

苹果果炒饭
0
主题
1
回复 |
18#
这个滑台做的哈好

|
|||
|
包子不是狗包子
0
主题
1
回复 |
19#
楼主,请问这个有开源的算法么
|
|||
|
小小宅138
13
主题
42
回复 |
20#
算法是自己写的,不够完善,也谈不上开源了
单片机小白
|
|||
|
年糕666
0
主题
1
回复 |
21#
您好楼主 我是今年大四的一名学生 目前的毕设课题就是基于单片机的写字机器人设计 基于Gcode电机控制系统 有些许不太懂的地方 能否获取您的联系方式有些问题想咨询 望回复 我微信是18021036271 这个网站不常登录 拜托了!!!!!
|
|||
|
hunter913
0
主题
1
回复 |
22#
楼主,楼主。我想联系你做个项目hunter913sh
|
 发表于2018-11-23 13:20:02
发表于2018-11-23 13:20:02





 回复
回复
 收藏
收藏
 举报
举报





|

