随着汽车工业的不断发展,汽车电子控制单元逐渐增多,各电控单元之间的信号交换更为复杂。而CAN总线可将汽车内部各电控单元之间连接成一个局域网络,实现了信息的共享,大大优化了整车的布线。
接下来,我们将继续为大家分享CAN相关技术知识。
CAN的分层架构
它由三层组成,即应用层、数据链路层和物理层。
• 应用层:该层与操作系统或CAN设备的应用程序交互。
• 数据链路层:它在发送、接收和验证数据方面将实际数据连接到协议。
• 物理层:它代表实际的硬件,即CAN控制器和收发器。
CAN物理层特性
CAN物理层被分为三个部分:在CAN控制器芯片中实现的物理编码,指定收发器特性的物理介质附件,物理介质依赖子层,这是特定的应用,没有标准化。

图1. CAN总线接线图
物理编码子层
PCS包括比特编码和解码、比特定时。它为收发器芯片提供连接单元接口,并包含Tx和Rx引脚,位级错误也通过位填充来处理。
位时序
出于时序目的,CAN总线上的每个位都划分成至少4个时间份额,时间份额逻辑上划分成4段:同步段传播段相位缓冲段1相位缓冲段2
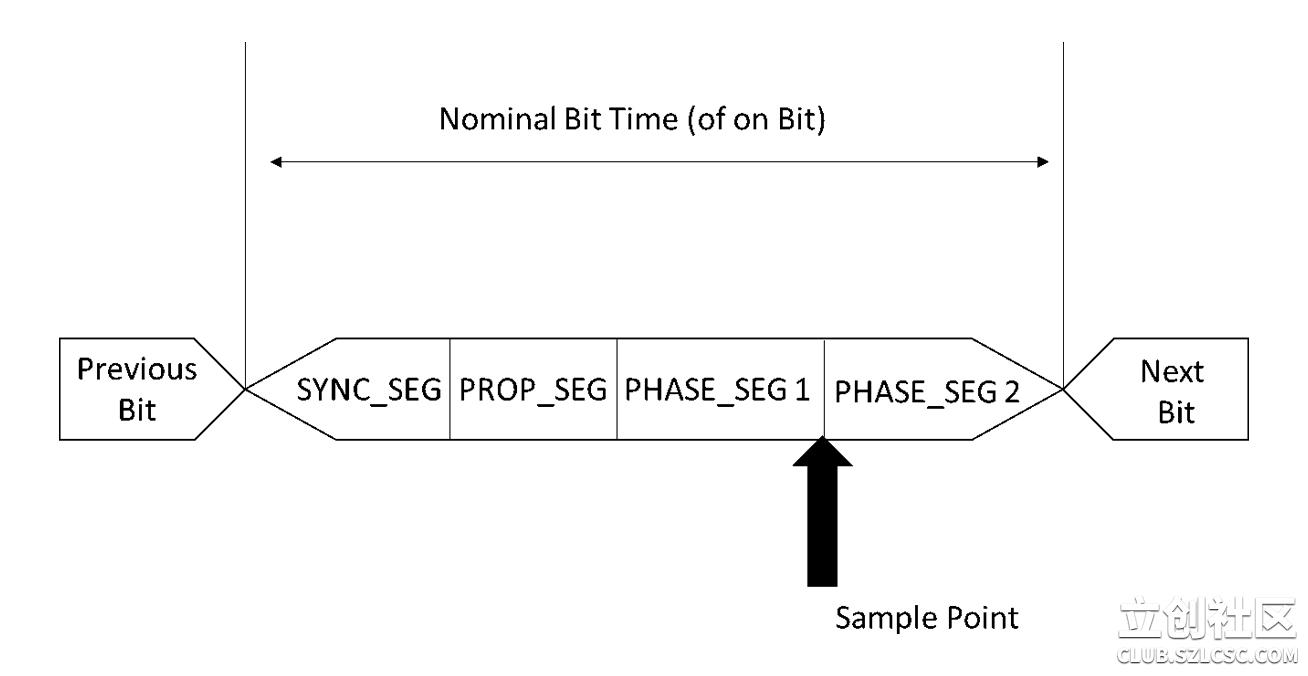
图2. CAN位时序
同步段
1个时间量子长度,用于多个连接在总线上的单元,通过此段实现时序调整,当总线电压电平发生变化(显性到隐性或隐性到显性)时,预计该段会出现位沿。
传播段
用于补偿网络上节点之间的物理延迟,包括发送单元的输出延迟、总线上信号的传播延迟、接收单元的输入延迟。
相位缓冲段
相位缓冲段用于补偿节点间的晶振误差,又分为相位缓冲段1(PS1)和相位缓冲段2(PS2),在这个时间段的末端进行总线状态的采样。两个相位缓冲段PS1和PS2用于补偿总线上的边沿相位误差。
采样点
采样点是位时间内的一个时间点,在该时间点,读取总线电平并进行分析。位时间内的采样点决定CAN总线电压是隐性还是显性。以位时间的百分比表示,位置从位时间的起点开始计算,位于阶段1和阶段2之间。
处理位级错误
位数填充
CAN协议遵循NRZ编码进行传输。逻辑电平在位间隔之间不发生变化。CAN需要一个逻辑电平的转换来进行再同步。因此,在5个相同的连续比特之后,将发送1个相反逻辑电平的比特。这就是所谓的东西位,接收器可以识别它。
位错误
一个正在发送比特的节点总是监控总线,如果发射器发送的比特与总线上的比特值不同,则会产生一个错误帧。
物理介质依赖子层
该层在CAN收发器芯片中实现,通过Tx和Rx引脚从CAN控制器获得输入,输出驱动CANH和CANL线。收发器负责不同的比特率,CAN总线速度指的是CAN总线通信速率。最大的CAN总线通信速率是1Mbit/sec。对于特殊的应用,一些CAN控制器将处理更高的速度,超过1Mbit/sec。低速的CAN通信速率是125kbits/sec。
与介质有关的子层
依赖介质的子层是高度特定的应用,不同连接器的引脚分配标准化属于这一层,各种连接器为DB9、OBD II。
CAN总线DB9引脚布局
CAN总线通常通过连接器访问。
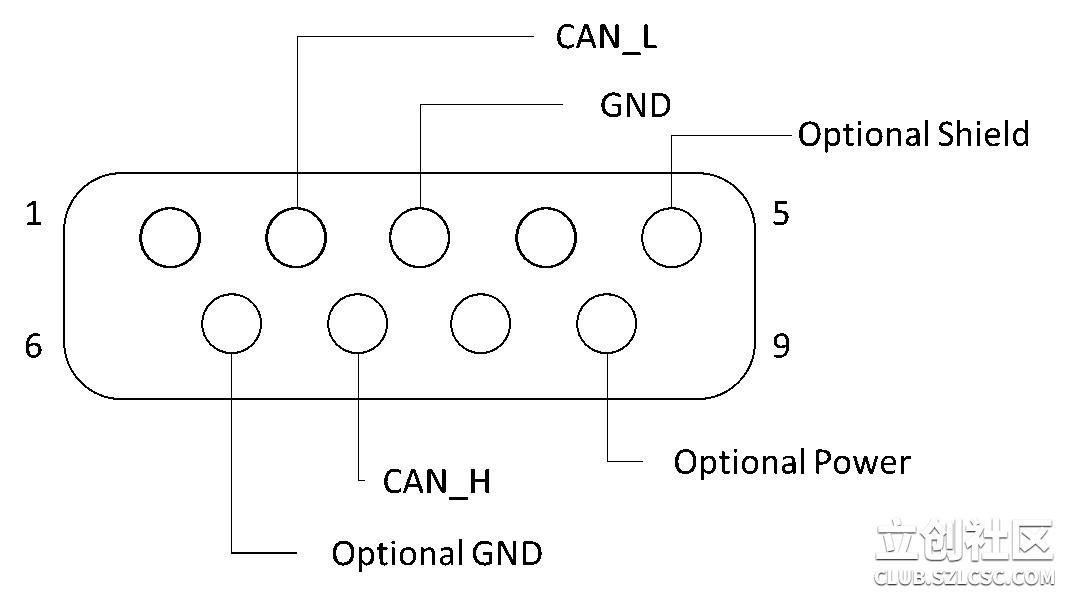
图3. CAN总线DB9引脚分配
引脚1:无定义
引脚2:CAN_L
引脚3:CAN GND
引脚4:无定义
引脚5:CAN_SHLD
引脚6:GND
引脚7:CAN_H
引脚8:无定义
引脚9:CAN_V+
各种微控制器中的CAN总线支持
微控制器应具有CAN硬件和软件,提供CAN驱动程序以实现通信。Python-CAN库也可用于为微控制器的硬件组件提供抽象的驱动程序,并用于通过CAN网络发送和接收消息。Python CAN总线也用于测试硬件和 CAN 总线数据记录。
用于Arduino的CAN总线屏蔽
• CANbus Shield采用带有SPI接口和CAN收发器的CAN总线控制器,为Arduino提供CAN总线能力。
• 带有CAN总线的Arduino有助于从ECU获取车速、油耗、温度等信息。
• Arduino CAN库用于通过CAN总线发送和接收CAN消息。
树莓派CAN总线:
树莓派没有特定的硬件,即CAN控制器和CAN收发器来支持CAN协议。树莓派软件不支持CAN总线,树莓派支持通过 SPI 接口进行 CAN 通信。
树莓派通过SPI接口连接到板子支持的外部CAN控制器,CAN控制器通过Rx和Tx线连接到CAN收发器。
CAN控制器示例:SJA100、MCP2515
CAN收发器示例:TJA1040、MCP2551
ACM32 CAN总线:
ACM32-F0/F4芯片内置1路~2路CAN控制器,并提供对应的CAN总线接口驱动库,搭配外部的CAN收发器,保证CAN总线数据通讯的安全可靠。
如何读取CAN总线数据?
当CAN总线与Microchip CAN总线分析仪、CAN总线Wire Shark等外部工具连接时,可以通过CAN USB适配器访问CAN总线数据,该适配器提供与计算机或PC的USB端口的即时连接。CAN USB适配器也可以通过以太网、互联网、内联网从任何地方进行控制。CAN总线Wireshark是一种用于Linux系统的工具,尤其以以太网网络分析而闻名,它通过使用SocketCAN来显示CAN消息,SocketCAN是一组驱动程序和网络堆栈,因此被称为Linux CAN总线。CAN to USB帮助外部工具从CAN网络获取消息,然后用于监控和调试接收或传输信息的工具。
但是这些消息是原始格式的。因此,从这些数据记录器收集的数据使用CAN总线解码器转换为按比例缩放的工程值。从数据记录器收集的数据也可以存储在SD卡中,这有助于控制车辆设置以提高效率。收集的CAN总线数据可用于车队管理、研发、诊断等。
用万用表测试CAN总线
测试是必要的,以检查任何发生的CAN总线故障,如布线、ECU、CAN网络中的任何一个组件的电压供应故障。CAN总线的故障排除,如在CAN总线线路的物理端添加120欧姆的终端电阻,可以诊断出问题。通过用万用表测试,确保终端电阻是120欧姆,而且电阻是合适的,没有断裂,还可以通过将万用表切换到交流电压来测试传输的数据。
如何判断汽车是否有CAN总线?
配备CAN总线的车辆包含CAN总线LED和CAN-BUS HID 套件。CAN总线LED与汽车高级系统通信,当此LED关闭时,车辆会发出警告。CAN BUS HID KIT充当DC到AC转换器,并有助于在最初使用高压电流打开灯。一旦灯启动,它需要较低的电压电流。但是当HID使用低功率时,CAN总线系统会假定灯已关闭并发出警告。为了避免这种情况,使用了HID转换套件,它与CAN总线系统通信以告知有一个工作灯泡。这些警告告诉我们汽车配备了CAN总线。
CAN总线黑客攻击
CAN总线黑客攻击是对消费者的威胁。CAN总线车辆采用了许多无线技术,例如蓝牙,用于接听电话或播放音乐。当车载系统接入车内的CAN总线并具备 Wi-Fi连接能力时,黑客很容易获得CAN总线接入并能够控制汽车。Wi-Fi热点在汽车中很流行,这使得知道汽车IP地址的人可以跟踪汽车。这导致汽车制造商对CAN总线网络上的传输数据进行保护。




 返回列表
返回列表


 发表于2022-02-18 14:37:24
发表于2022-02-18 14:37:24




 回复
回复
 收藏
收藏
 举报
举报


