COCOFLY 教程
——疯壳·无人机·系列
开发环境搭建

图1
一、 MDK 的安装
Keil 公司开发的 ARM 开发工具 MDK,是用来开发基于 ARM 核的系列微控制器的嵌入式应用程序。它适合不同层次的开发者使用,包括专业的应用程序开发工程师和嵌入式软件开发的入门者。MDK 包含了工业标准的Keil C 编译器、宏汇编器、调试器、实时内核等组件,支持所有基于 ARM 的设备,能帮助工程师按照计划完成项目。
下载链接为:https://www.fengke.club/resources/details/20325。这里也提供到了安装包位于“软件工具”文件夹下的“MDK5”内。
双击 mdk511a.exe 进行安装。安装路径可以自己选择,注意路径中不能有中文, 这里我们安装在 D 盘,如下图所示。
图2
点击“NEXT”,进行下一步, 将公司、 邮箱等内容简单填写上就行, 点击“NEXT”进行安装, 如下图所示。
图3
安装完成之后, 显示如下图所示。
图4
点击“Finish” 完成安装,随后弹出包安装器界面,如下图所示。
图5
点击左上角的刷新图标可以自动获取最新的安装包,可能速度比较慢,可以直接到 keil 官网下载, 这里我们至少需要安装 CMSIS 和 STM32F103 两个安装包,这两个我们已经随 MDK5.11a 一并提供,直接双击即可安装。
为了兼容低版本的 keil 工程,需要安装 mdkcm511a.exe,该文件我们也一并提供,双击直接安装。 安装之后运行低版本的 keil 工程就不会出现兼容性问题。下面进行破解,先打开刚安装好的 keil 软件,点击 File->License Management, 调出注-册管理界面,复制右上方的 CID 号,如下图所示。
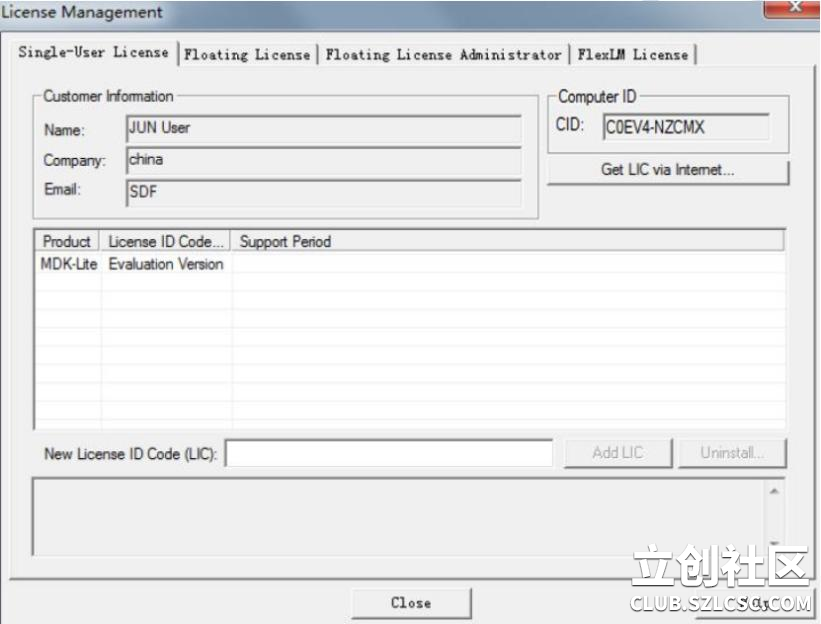
图6
此时 keil 的使用是有限制的,最多只能编译 32K 的代码。运行 keygen.exe, 将 Target 选为 ARM,让后将刚才赋值的 CID 号粘贴到注册机的 CID 输入框中, 点击“Generate”,下方会生成注-册-码,如下图所示。
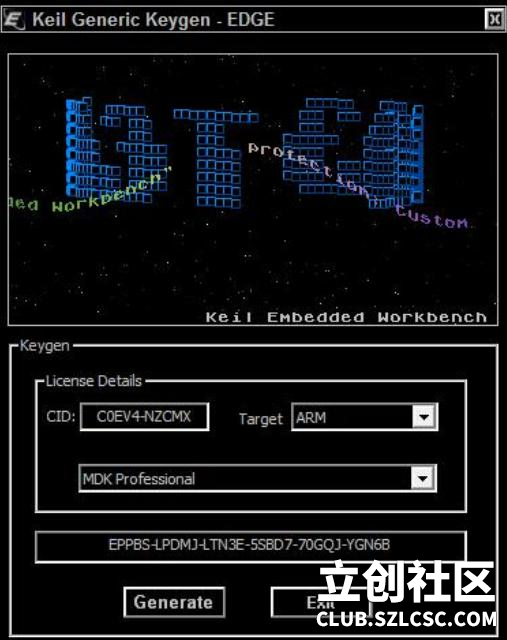
图7
将生成的注-册-码拷贝到注册管理界面中 LIC 输入框中,然后点击 Add LIC即可,如下图所示。
图8
可以看到下方提示添加成功。
安装完成后 MDK 后需要添加对应的芯片包,可以在 MDK 的工具栏,点击“Pack Installer”,如下图所示

图9
然后找到“STM32F1”系列的芯片包安装(飞机和遥控手柄均为 STM32F1 系列芯片),这种方式比较慢,可以直接使用提供的 STM32F1 芯片包即可,如下图所示。
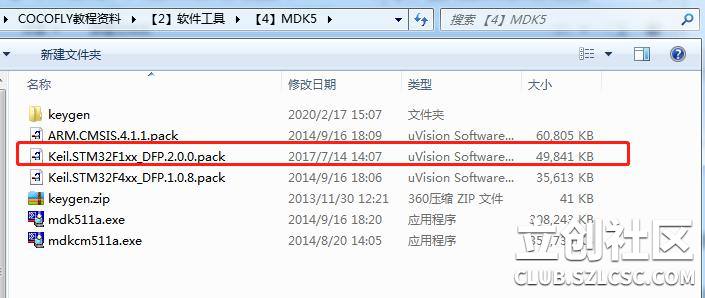
图10
直接双击安装,点击下一步,直到安装完成即可。
二、 JLINK 驱动安装
J-Link 是 SEGGER 公司为支持仿真 ARM 内核芯片推出的 JTAG 仿真器。配合 IAR EWAR,ADS,KEIL,WINARM,RealView 等集成开发环境支持所有ARM7/ARM9/ARM11,Cortex M0/M1/M3/M4, Cortex A5/A8/A9 等内核芯片的仿真,与 IAR,Keil 等编译环境无缝连接,操作方便、连接方便、简单易学,是学习开发 ARM 最好最实用的开发工具。
下载链接为:https://www.fengke.club/resources/details/20325。这里也提供到了安装包位于“软件工具”文件夹下的“JLINK 工具及驱动”内。
在使用 J-Link 开发前需要安装驱动程序,如果电脑上已经安装了 Jlink 驱动, 可以忽略。双击解压得到的可执行文件 Setup_JLinkARM_V474b.exe, 弹出协议对话框,选择 Yes,如下图所示。
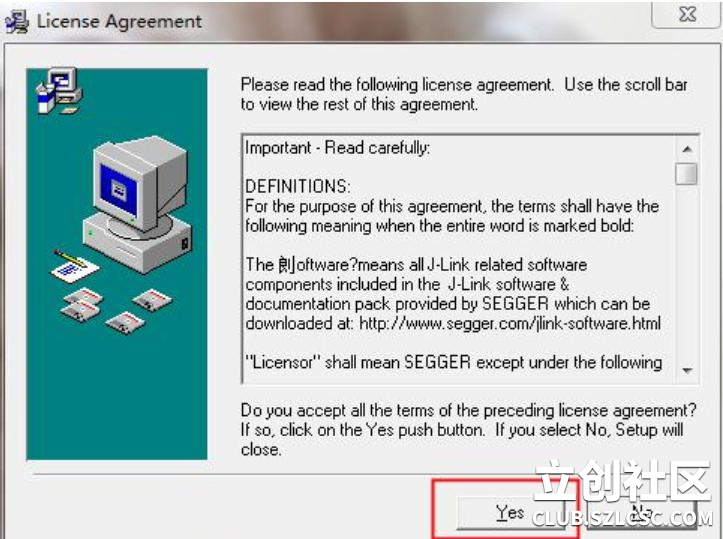
图11
之后一直点击 Next,如下图所示。
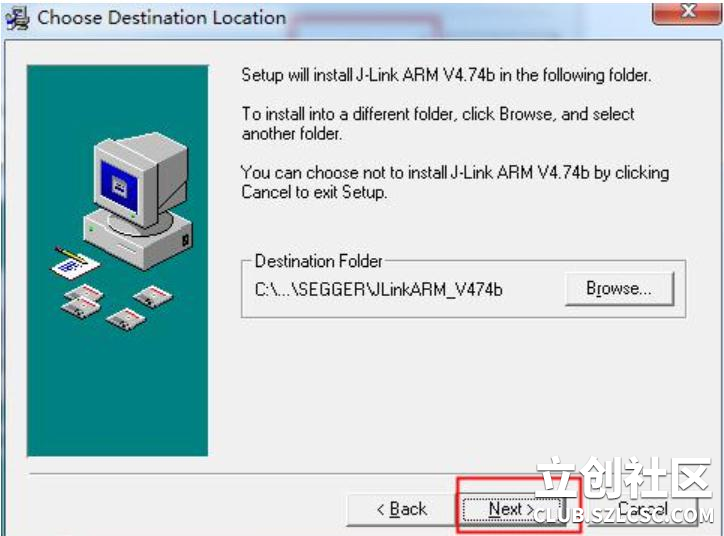
图12
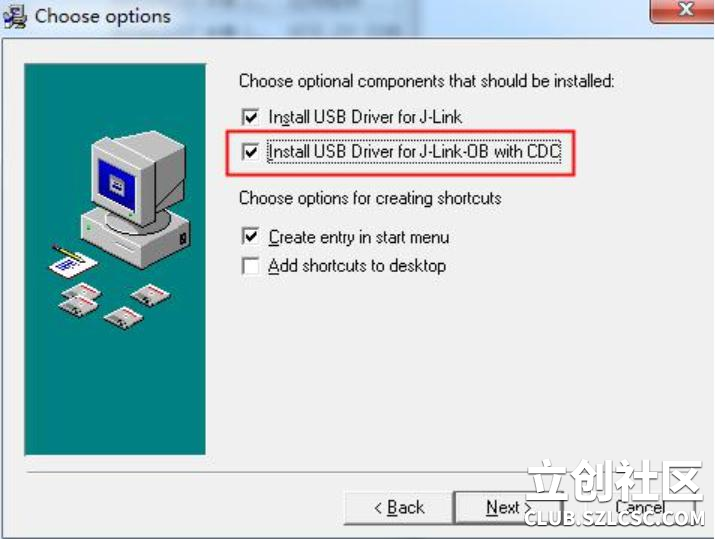
图13
此处需要在 Install USB Driver for J-Link-OB with CDC 前面打钩,如下图所示。
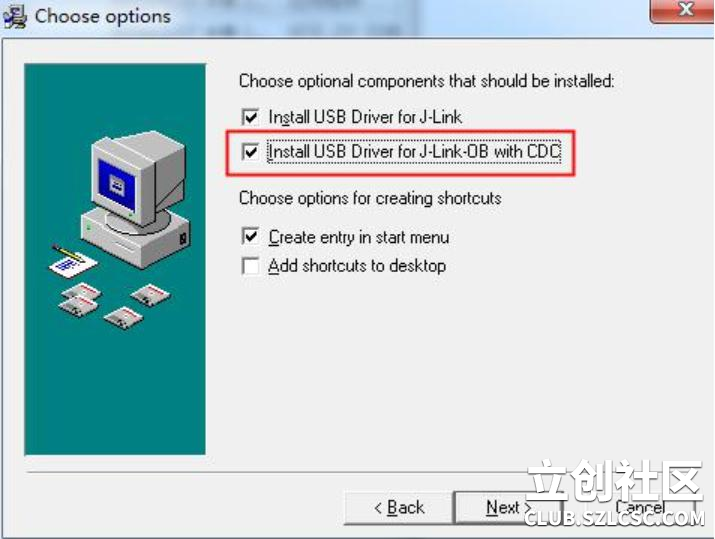
图14
继续点击“Next”,如下图所示。
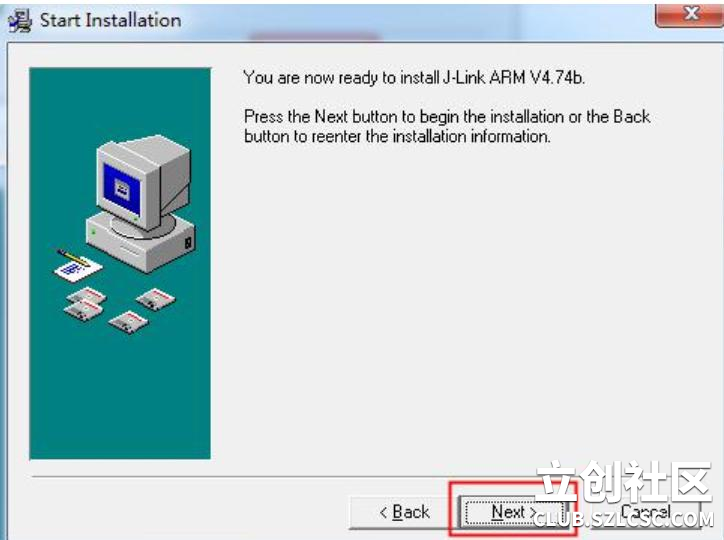
图15
等待安装,如下图所示。
图16
安装完之后,如果检测到电脑中有开发环境使用到 Jlink,会弹出对话框选择进行关联,直接点击 OK 即可。最终安装完成,点击 Finish 结束安装, 如下图所示。
图17
安装完成之后,在开始菜单中可以找到安装的文件,如下图所示。
图18
插上 Jlink 下载器,就会自动安装驱动,安装成功如下图所示。

图19
三、 USB 转串驱动的安装
单片机的电平是 TTL 电平,如果单片机要通过串口和电脑进行通信,需要通过 USB 转串口芯片,这里使用的是 CP2102。
下载链接为:https://www.fengke.club/resources/details/20325。这里也提供到了安装包位于“软件工具”文件夹下的“USB 转串口驱动”内。
下面进行 CP2102 的 USB 转串驱动的安装,如果电脑上已经安装CP2102 的 USB 转串驱动可以忽略。首先将压缩包解压,文件名为: CP2102+usb+driver.zip。 双击运行解压后的文件, 一直点击“Next”,直到“Finish”,即完成安装。
四、COCOFLY 地面站安装
COCOFLY 地面站是配套 COCOFLY 无人机使用的,功能非常的全面,后面的编队,PID 调参等都需要用到该软件,该地面站上位机的安装包已经提供在了资料包下的“软件工具”下的“COCOFLY 地面站上位机”文件夹内,如下图所示。

图20
双击即可开始安装,点击安装后会弹出一个安装向导对话框,如下图所示, 点击“下一步”。
图21
弹出路径选择框,选择需要安装的路径,如下图所示,点击“安装”。
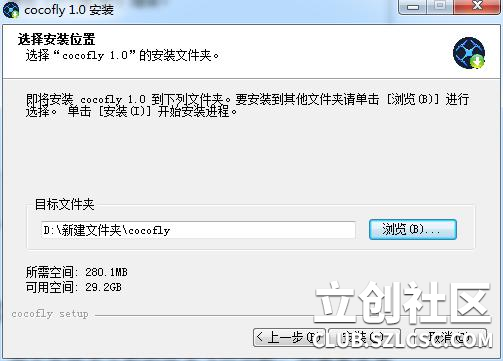
图22
然后等待进度条走完,安装完成后会弹出安装完成的提示框,如下图所示。
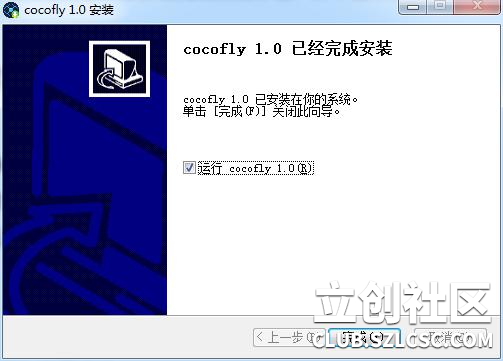
图23
点击“完成”,就可以打开安装好的 COCOFLY 地面站了,如下图所示。
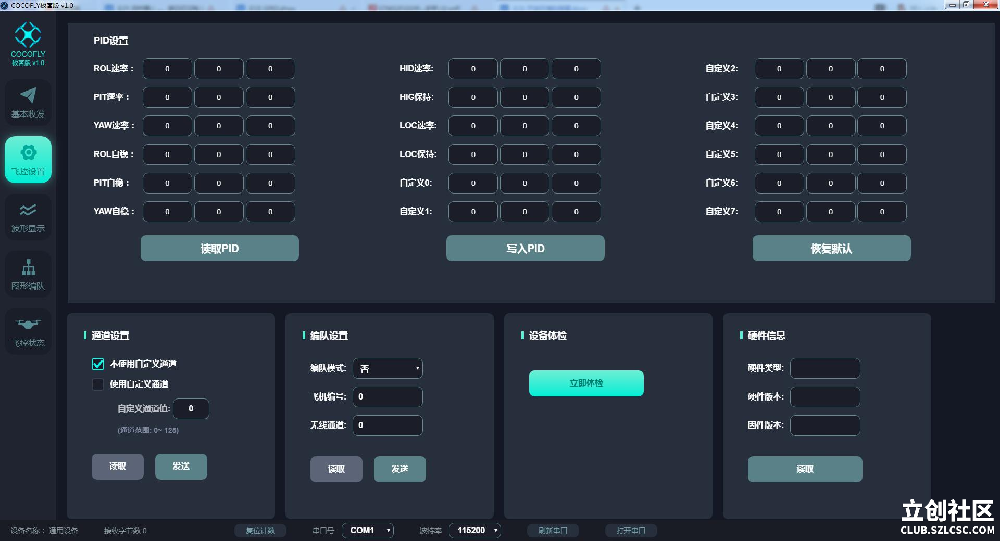
图24
五、cocobit 上位机安装
若要使用 cocobit 编程板,用于实现无人机的自主飞行功能,则需要安装cocobit 上位机。
下载地址为 https://www.cocobit.net/download。这里也提供到了安装包位于“软件工具”文件夹下的“COCOBIT 上位机”内。
根据自己的电脑选择适合的版本即可,下载完成后双击 exe,选择合适的路径,直到完成安装。安装完成后即可打开 cocobit 上位机,如下图所示为 cocobit 上位机启动的 logo。

图25
双击即可打开,打开后界面如下图所示。
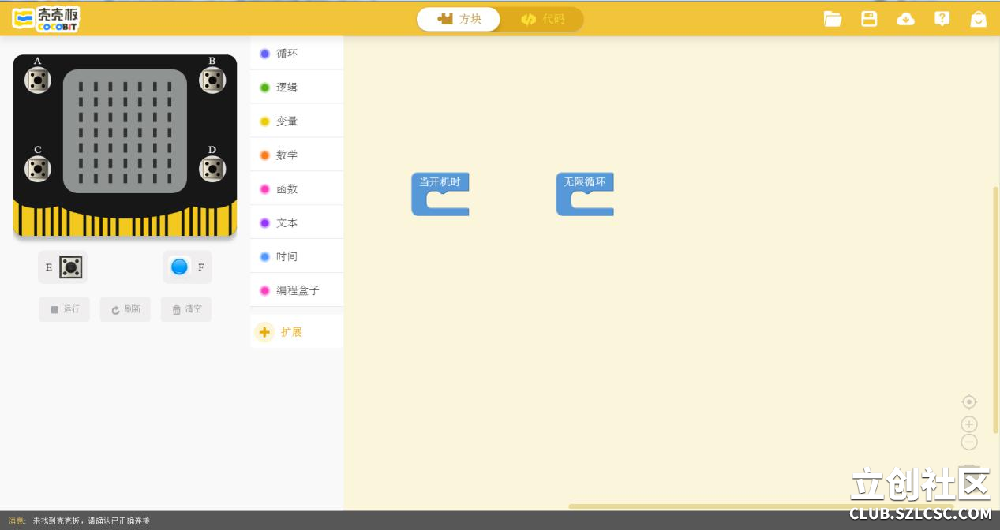
图26
六、openmv-ide 安装
openmv-ide 是用于视觉识别模块的代码的编写以及下载的一个工具软件,其下载地址为:https://openmv.io/pages/download。这里也提供到了安装包位于“软件工具”文件夹下的“OPENMV 相关”内。
双击 exe 进行安装,如下图所示为 openmv ide 开始安装示意图。
图27
点击下一步,会弹出一个安装路径的对话框,选择一个合适的路径,如下图所示,然后点击下一步。
图28
然后一直点击下一步,直到安装完成即可。打开 openmv ide,其界面如下图所示。
图29
文件下载请点击:【2】开发环境的搭建.pdf
开机测试及硬件资源介绍:【1】开机测试及硬件资源介绍.pdf




 返回列表
返回列表


 发表于2022-08-15 14:57:01
发表于2022-08-15 14:57:01



 回复
回复
 收藏
收藏
 举报
举报

