COCOFLY教程
——疯壳·无人机·系列
地面站上位机的使用和介绍

图1
COCOFLY 地面站上位机是配套 COCOFLY 无人机使用的,该地面站上位机功能非常的全。主要分为 5 大功能板块,分别是基本收发、飞控设置、波形显示、图形编队以及飞控状态。
1.1基本收发
基本收发可以相当于是串口调试助手,可以在基本收发中设置通讯的端口、波特率、以及收发的显示格式,例如 CHR(字符)、Hex(16 进制)。
图2
使用的时候非常的简单,只需点击刷新在串口号中找到对应的串口,在选择合适的波特率点击“打开”即可。
1.2飞控设置
飞控设置顾名思义是对飞控主机进行设置操作,在该设置页面下可以对飞机进行读写 PID 调节值,也可以恢复预设的 PID 值,除此之外还可以随意设置飞机的 2.4G 的通信信道,也可以设置为编队模式,还可以读取设备的版本信息, 值得注意的是,一旦飞控或者遥控器锁机后,可以在这里进行设备体检,进行解锁,如下图所示。
图3
如果需要修改 PID 值,只需要在各项参数内修改为需要修改的参数,点击“写入 PID”,即完成 PID 值的修改;修改后可以点击“读取 PID”,如果读取的和写入的一致,则代表写入成功;如果发现修改 PID 后,飞机非常地飘,想要恢复出厂的 PID 设置,则可以点击“恢复默认”,这样飞机的 PID 参数就恢复到出厂的默认值了。
1.3波形显示
波形显示主要有两大功能,一个是调试参数,另一个是查看频谱干扰,这两项功能都是需要把遥控器接到上位机,并且打开串口。遥控器连接上无人机后再通过 USB 线接上位机,只需要勾上 Data1~Data8,再点击“显示波形”,就可以看到代码中添加打印数据的波形(这里的数据是飞控传过来的),如下图所示。
图4
这里数据为 0,所以是一条直线,Data1~Data8 显示的数据均可以在代码中更改,Data1~Data8 的波形显示的修改格式为下图所示(具体参照飞控代码的Data_Transfer.c 的 DT_Send_User()函数)。
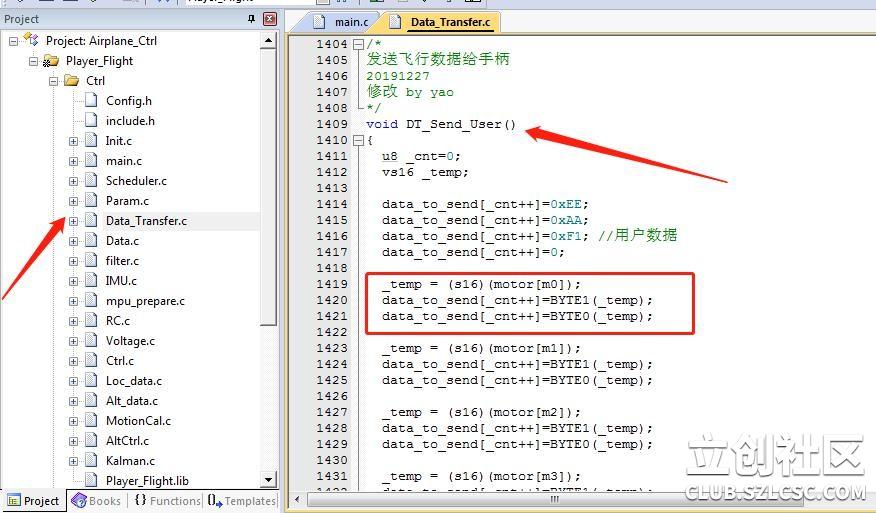
图5
如果要切换到查看频谱数据,则需要勾上“频谱仪”,即可,如下图所示。
图6
勾上“频谱仪”后就会看到 2.4G 下每个信道的干扰情况了(y 轴越高,干扰越严重),用户可以根据这个参数来设置飞机的信道(选择干扰低的)。
1.4图形编队
图形编队用于编队设置,使用该页面功能需要上位机连接遥控器,编队模式下,一个遥控器对应多架飞机。
该页面支持设置编队信息、设置编队队列动作、真机编队控制、飞行轨迹预览以及查看机群信息等。
该界面如下图所示。
图7
编队的详尽地使用方法可以参考《飞控开发高级篇-编队飞行》。
1.5飞控状态
该页面用来查看飞机的飞行姿态,只需要把与飞机配对好的遥控器与上位机相连接,就可以在界面查看飞机的姿态。其中的“箭头”代表的是飞控的方向, “圆点”代表的是飞控的姿态。如下图所示。
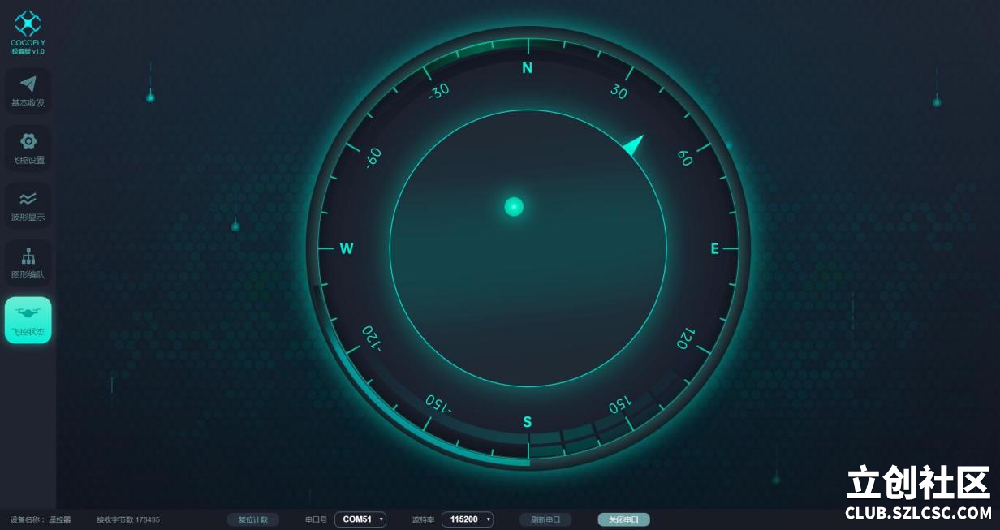
图8
部分图片无法上传,有兴趣的伙伴请点击下载下方的原文件查看
文件下载请点击:【5】地面站上位机的使用和介绍.pdf




 返回列表
返回列表


 发表于2022-08-16 16:23:25
发表于2022-08-16 16:23:25



 回复
回复
 收藏
收藏
 举报
举报

