COCOFLY教程
——疯壳·无人机·系列
定时器(LED 航情灯、指示灯闪烁)

图1
一、定时器简介
定时器具有定时功能,类似于生活中的“闹钟”,可以用定时器产生精确的定时时间,用来延时或者处理一些实时事件。
STM32 系列的定时器分为基本定时器、通用定时器、高级控制定时器。后者包括前者的全部功能。通常地,STM32 高级定时器是 TIM1、TIM8,通用定时器是 TIM2、TIM3、TIM4、TIM5,基本定时器是 TIM6、TIM7。
而飞控的主核心 STM32F103CBT6 则有 4 路 16 位定时器分别是高级定时器TIM1、通用定时器 TIM2、TIM3 以及 TIM4。
二、定时器寄存器
STM32F103 定时器相关的寄存器众多,这里只讲解重要的几个寄存器。
(1)TIMx_CR1:使能寄存器,最低位控制寄存器的开关,如下图所示:
图2
TIM_CR1 寄存器主要配置定时器的循环计数、使能等操作,例如 CEN 位为1 是使能计数,为 0 是关闭计数。
(2)TIMx_DIER: 定时器中断使能寄存器, 最低位控制事件更新中断的开关, 如下图所示:
图3
该寄存的主要功能是配置定时器是定时器的中断使能位,主要使用的是 UIE位,UIE 为 1 是使能中断,为 0 时关闭中断。
TIMx_PSC:定时器时钟分频寄存器,如下图所示:

图4
该寄存器负责把定时器时钟分频之后,再输出给计数器,PSC[15:0]为分频系数。
(4)TIMx_ARR:定时器自动重装载寄存器,如下图所示:

图5
ARR[15:0]为自动重装载值,当定时器采用向上计数时,计数值等于 ARR 时, 产生一个更新事件;当定时器采用向下计数时,最开始将 ARR 的值赋给计数值, 计数值向下累减为 0 时,产生一个更新事件,再次将 ARR 的值赋给计数值,进行新一轮的向下计数。
(5)TIMx_SR: 状态寄存器,标记当前与定时器相关的各种事件/中断是否发生,我们只用到最低位表示事件更新中断的标志位,如下图所示:

图6
该寄存器主要用于查看定时器的更新中断标志位,当计数发生上溢或者下溢时,UIF 位将被置 1,标志一次计数完成。
三、定时器实验
本节实验的内容是主要是针对GPIO 中的周期性点亮无人机的航情灯以及信号灯,对其进行变形,使用通用定时器 TIM3 精确定时周期性点亮及关闭无人机的航情灯以及信号灯。
同样也是查看原理图可以得知无人机的航情灯同一接在NPN 三极管Q1 上, 而三极管的基极又接在了单片机的PA8 上;两个信号灯分别接在了 PC13 和PC14 上。
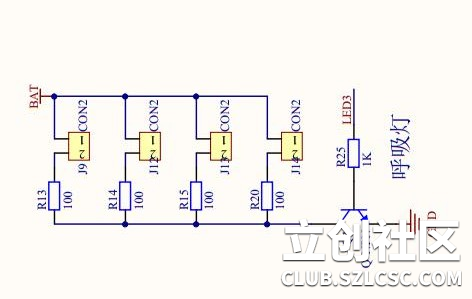
图7

图8
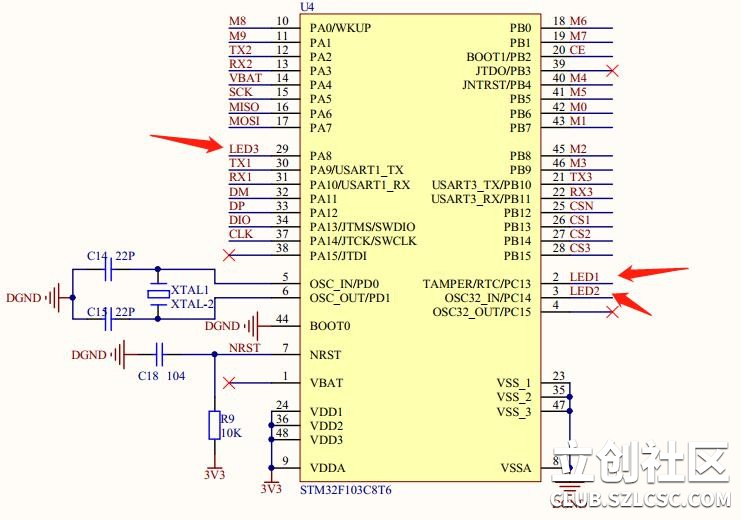
图9
关于 GPIO 这部分的驱动代码可以沿袭保留,不同的是需要加入定时器的初始化以及配置定时器中断,编写代码的思路如下表所示。

图10
按照代码思路,编写代码(通过调用官方库)如下图所示为 GPIO 相关驱动代码:
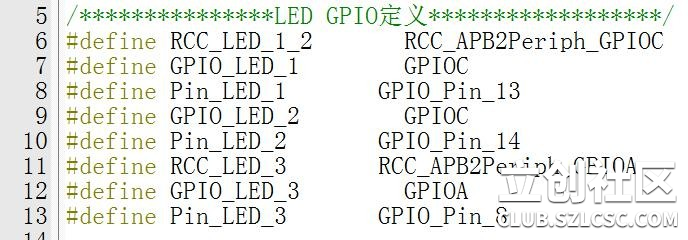
图11
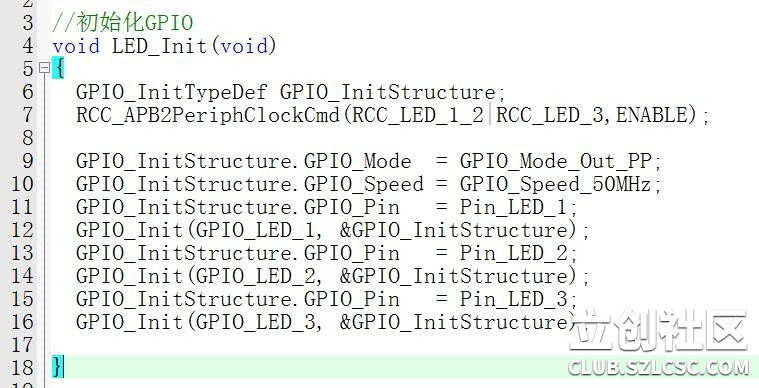
图12
完成配置 GPIO 后,便是对定时器进行配置,我们的 STM32 是外接了 8MHz的晶振的,主频是 72MHz 先来看一下时钟树图,如下图所示。
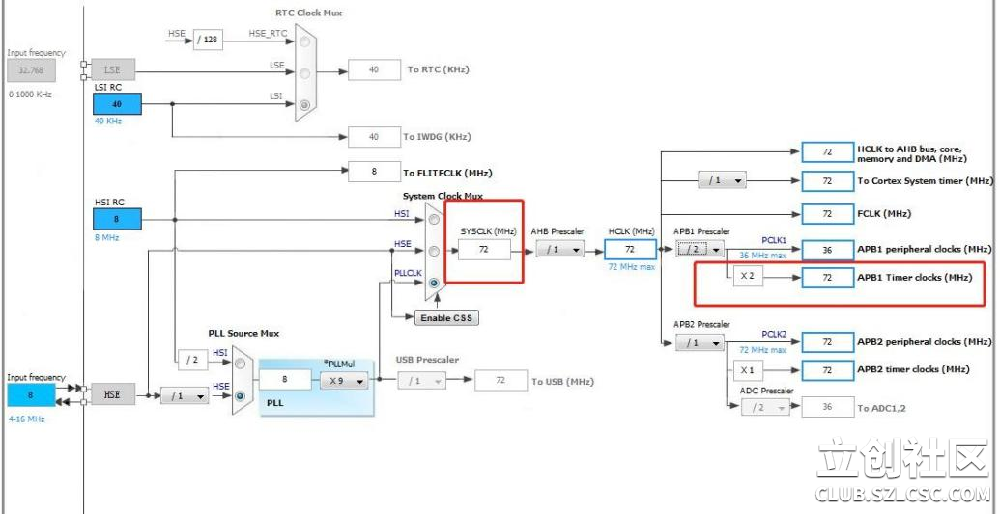
图13
定时器是挂载在 APB1 时钟总线下的(从手册可知),从时钟树图中可知APB1 用于定时器的时钟频率在未分频的是情况下 72MHz,根据定时器时钟分频寄存器(TIMx_PSC)以及定时器自动重装载寄存器(TIMx_ARR)之间的关系, 可以得出,定时时间:
Tout=((arr+1)*(psc+1))/Ft s
其中 Tout 为定时时间单位为 s,arr 为自动重装载寄存器的初值,psc 为分频系数,Ft 为 APB 的主频,也就是 72MHz。那么要定时 1s 则只需要把 arr 设置为载值 9999,psc 设置为 7199 即可,即:
Tout=((9999+1)*(7199+1))/72000000
=10000*7200/72000000
=72000000/72000000
=1s
所以可以得到定时器初始化代码如下图所示。

图14
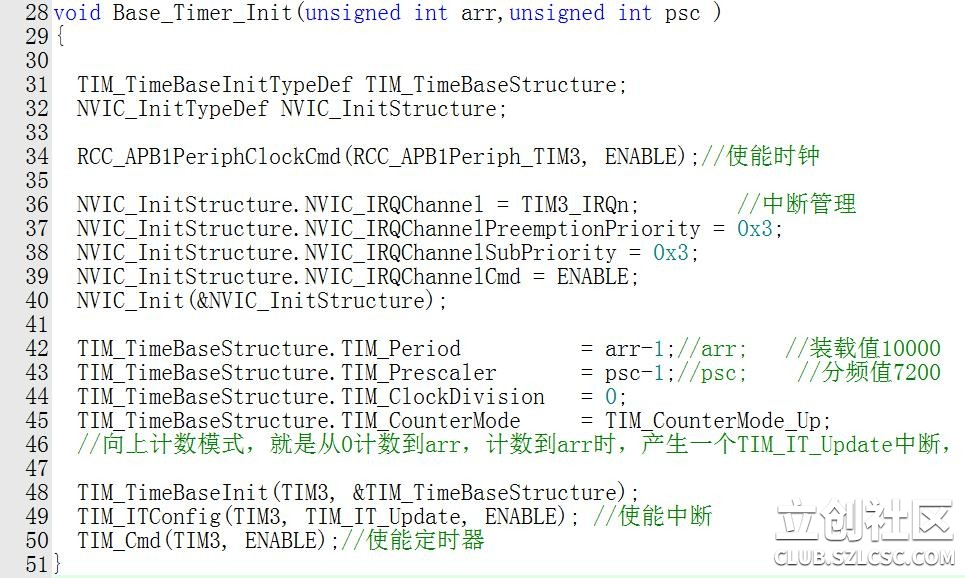
图15
配置完成后便会 1s 周期进入一次定时器中断,在定时器中断里对无人机的航情灯以及指示灯的 GPIO 端口进行翻转即可实现,周期性点亮,代码如下图所示。
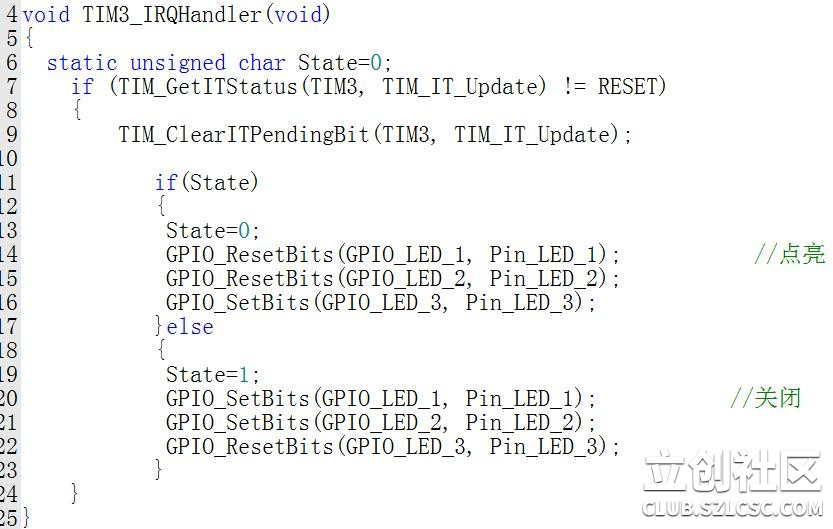
图16
写好代码后保存、编译、下载,然后就可以看到飞控的 LED 指示灯以及四个螺旋桨下面的航情灯周期 1S 闪烁,如下图所示。
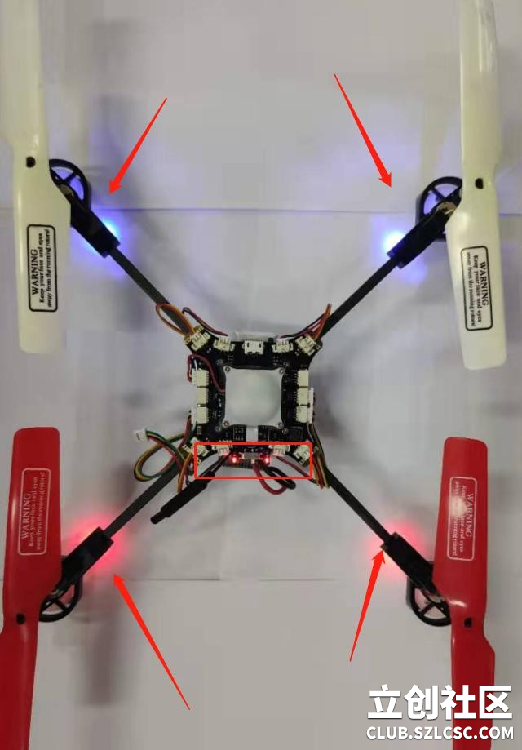
图17
部分图片无法上传,有兴趣的伙伴请点击下载下方的原文件查看
文件下载请点击:【2】定时器(LED航情灯、指示灯闪烁).pdf




 返回列表
返回列表


 发表于2022-08-17 14:38:49
发表于2022-08-17 14:38:49



 回复
回复
 收藏
收藏
 举报
举报

