COCOFLY教程
——疯壳·无人机·系列
PWM(电机控制)
图1
一、PWM 简介
脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
PWM 在生活中非常的常见,小到呼吸灯的闪烁,达到航天飞船都会应用到
PWM 技术。PWM 的波形如下图所示。
图2
二、占空比简介
占空比是脉冲宽度调制技术中常用专业术语,占空比是指在一个时钟脉冲周期(T)内,高电平(t1)的时间占总周期时间的比值,即占空比(duty)=t1/T*100%
如下图所示是一系列典型的脉冲波形。
图3
第一个PWM 波,周期为 10ms,高电平的时间为 4ms,所以占空比为 40%,同理第二个 PWM 波为 60%,第三个为 80%。
一般地,占空比反映了等效幅值的大小:占空比越大,等效幅值越高;占空比越小,等效幅值越低。如下图所示为不同占空比对应等效幅值的关系示意图。
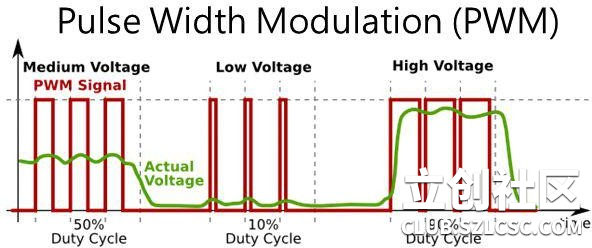
图4
三、STM32 的PWM 模式
STM32 上定时器有专门的 PWM 模式,它的原理是通过定时器使用比较输出的方式如下图所示产生波形。
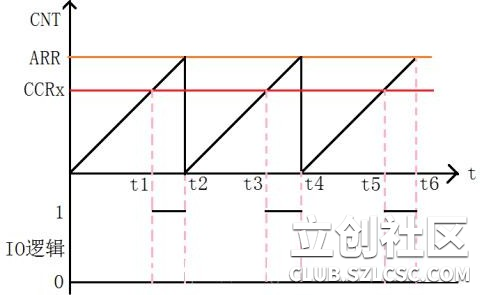
图5
ARR 为自动重载寄存器,CCR 为捕获/比较寄存器,CNT 就是定时器的计数器,CNT 的值从 0 开始递增,使用 PWM 模式后,可以设置有效电平,以及 PWM 的模式。上图所示的是当 CNT 的值小于 CCRx 时,输出低电平,当 CNT 的值大于 CCRx 时,输出高点平,所以我们可以通过改变 ARR 的值来改变 PWM 的周期,改变 CCRx 的值来改变 PWM 的占空比,从而实现任意频率任意占空比的PWM 波。
四、寄存器
STM32 的 PWM 输出模式涉及到以下寄存器。
(1)TIMx_CR1:定时器控制寄存器 1,如下图所示。
图6
其中 CKD 来设置时钟分频,ARPE 来使能自动重载预装载,CEN 来使能计数器。
(2)TIMx_CCMR1:定时器捕获比较模式寄存器,如下图所示。
图7
OC1M 来配置 PWM 的模式,PWM 模式 1,CNT<CCR1 时为有效状态、CNT>CCR1 时为无效状态;PWM 模式 2,CNT<CCR1 为无效状态、CNT>CCR1 为有效状态。OC1PE 来使能预装载。CC1S 来配置通道的输入输出模式(默认为输出模式)。
(3)TIMx_CCER:捕获比较使能寄存器,如下图所示。
图8
CC1P 来配置输出极性,可以选择高电平有效或者低电平有效。CC1E 来使能捕获/比较。
五、PWM 电机控制实验
PWM 电机控制实验使用 STM32 的定时器的 PWM 输出功能,可对飞控上的电机所在的引脚,产生不同占空比的 PWM,从而实现让四个电机以不同的速度旋转。(注意:做实验的时候,占空比不要调节过大,该实验会使旋翼转动,要小心无人机的旋翼划伤手)无人机的四个旋翼如下图所示。
图9
根据原理图,可以看到四个电机分别由两个 AO9926C 控制,AO9926C 其实想当于是两路的 N 沟道 MOS 管,两个 AO9926C 的四个 MOS 管的 G 极(栅极) 接口分别是:PB6、PB7、PB8、PB9,如下图所示。
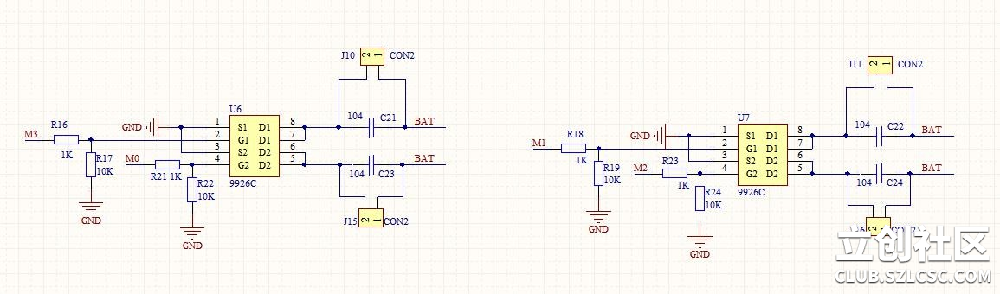
图10
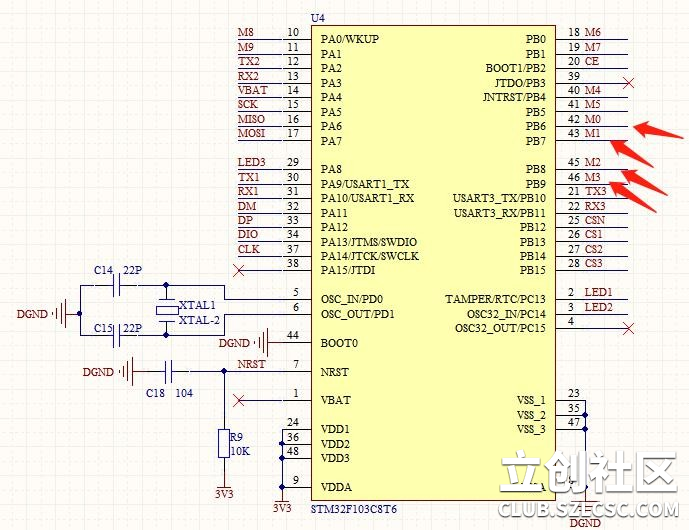
图11
查看数据手册可知,PB6、PB7、PB8、PB9 分别对应的是 TIM4_CH1、TIM4_CH2、TIM4_CH3、TIM4_CH4,即定时器 4 的输出通道 1~4。
配置输出 PWM 的代码编写的思路如下:
表1
定时器 PWM 输出的初始化代码如下:

图12
装载不同的 CCR 值,产生不同的占空比,从而使四个电机以不同的速度旋转,代码如下图所示。

图13
其中TIM4_CH1 装载CCR 值为25、TIM4_CH2 装载CCR 值为50、TIM4_CH3
装载 CCR 值为 75、TIM4_CH4 装载 CCR 值为 100。如下图所示。
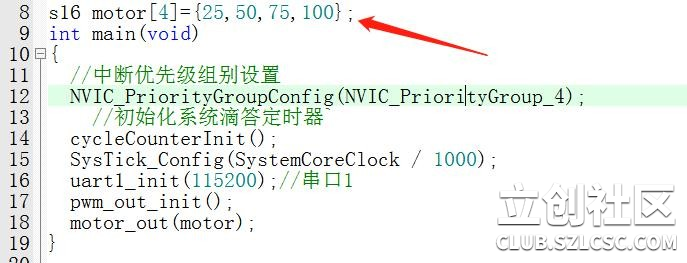
图14
保存、编译、下载代码(注意旋翼会转动,小心划伤),可以看到四个旋翼以不同的速度转动,其中转速的排序为接在 PB6 的电机<接在 PB7 的电机<接在PB8 的电机<接在 PB9 的电机。
部分图片无法上传,有兴趣的伙伴请点击下载下方的原文件查看
文件下载请点击:【9】PWM(电机控制).pdf




 返回列表
返回列表


 发表于2022-08-19 16:43:16
发表于2022-08-19 16:43:16



 回复
回复
 收藏
收藏
 举报
举报

