COCOFLY教程
——疯壳·无人机·系列
GPIO(遥控器指示灯控制)

图1
一、GPIO 简介
GPIO(General-purpose input/output),通用的输入输出的简称,单片机的引脚可以供使用者自由使用,可以配置为输出,也可以配置为输入。其中输出又可以是输出“高电平”或者“低电平”。在电子电路中“高电平”是电压高的状态, 用逻辑来表示即为 1,“低电平”是电压低的状态,用逻辑来表示即为 0。
STM32F103 系列是意法半导体基于 ARM Cortex M3 内核的 32 位单片机, 遥控器上用的主核心是 48 脚的 STM32F103C8T6,其片上的资源与飞控主板上的主核心 STM32F103CBT6 基本一致,不同点在于TM32F103C8T6 的 RAM 为20kBytes、Flash 为 64kBytes,而 STM32F103CBT6 的 RAM 为 20kBytes、Flash 为 128kBytes。其引脚如下图所示。
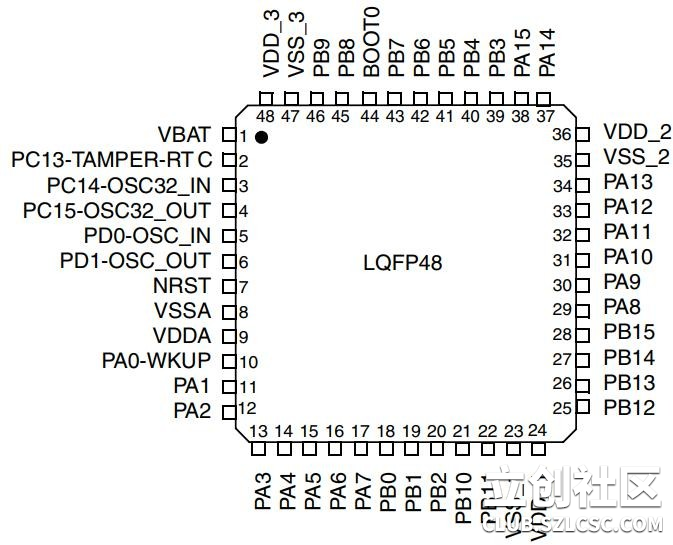
图2
STM32F103C8T6 的 GPIO 的功能较多,有 A、B、C、D 等四组 GPIO,每组每个 GPIO 口都可以作为输出输出口使用之外, 还能作为复用引脚使用, 比如串口、I2C、SPI 等特殊接口的引脚。 但是需要注意的是每个引脚的复用功能是有限制的, 所以硬件连接时需要注意每个引脚有哪些复用功能, 这个可以在STM32F103 的数据手册中查看。GPIO 口一共有 8 种模式,分别为:浮空输入, 上拉输入,下拉输入,模拟输入, 开漏输出, 推挽输出,推挽式复用功能,开漏式复用功能如下表所示。
STM32F103GPIO 工作模式
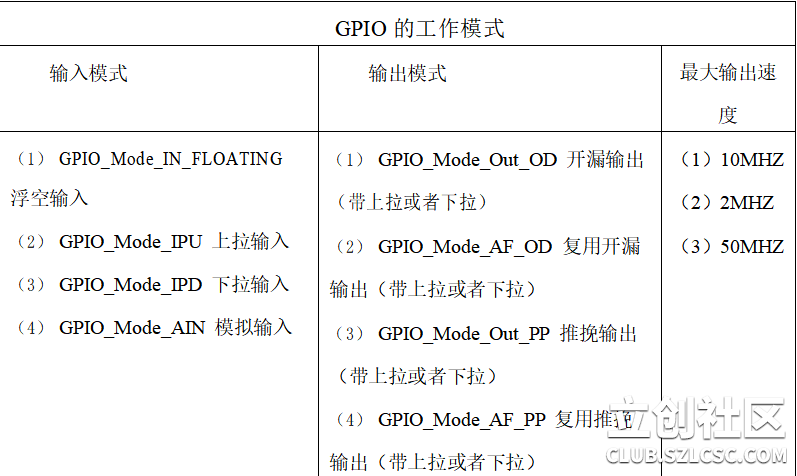
表1
这 8 种功能我们就不一一介绍了, 有兴趣可以上网搜索了解一下,这里主要讲解一下开漏输出和推挽输出的区别。
(1)开漏输出:
输出端相当于三极管的集电极. 需要上拉电阻才能得到高电平, 利用外部上拉电阻的驱动能力,减少 IC 内部的驱动,驱动能力强,适合于做电流型的驱动, 可达到 20mA。
(2)推挽输出:
可以输出高,低电平,连接数字器件,是由两个参数相同的三极管或MOSFET 以推挽方式连接,各负责正负半周的波形放大任务。电路工作时,两只对称的功率开关管每次只有一个导通,所以导通损耗小、效率高,既提高电路的负载能力, 又提高开关速度。
总结一下:推挽输出可以输出强高低电平,连接数字器件;而开漏输出只可以输出低电平,高电平得靠外部电阻拉高。输出端相当于三极管的集电极,要得到高电平状态需要上拉电阻才行,适合于做电流型的驱动,其吸收电流的能力相对强(一般 20ma 以内)。
二、GPIO 相关寄存器
STM32F103 的每个 GPIO 端口有:两个 32 位配置寄存器(GPIOx_CRL 和GPIOx_CRH)、两个 32 位数据寄存器(GPIOx_IDR 和 GPIOx_ODR)、一个 32 位置位/复位寄存器(GPIOx_BSRR)、一个 16 位复位寄存器(GPIOx_BRR)、一个 32 位锁定寄存器(GPIOx_LCKR)。
(1)GPIOx_CRL 寄存器(x=A~G)
图3
该寄存器用于配置 IO0~7 的输入输出模式以及速率设置。
(2)GPIOx_CRH 寄存器(x=A~G)
图4
该寄存器用于配置 IO8~15 的输入输出模式以及速率设置。
(3)GPIOx_IDR 寄存器(x=A~G)
图5
IDR 是 GPIO 的输入数据寄存器。通过 IDR 寄存器可以读出 IO 的状态。需要注意的是 IDR 寄存器只能以字(16 位)的形式读出。
(4)GPIOx_ODR 寄存器(x=A~G)
图6
ODR 是 GPIO 的输出数据寄存器。通过 ODR 寄存器可以输出高低电平。
(5)GPIOx_BSRR 寄存器(x=A~G)
图7
BSRR 是GPIO 的端口位设置/清除寄存器。BSRR 寄存器的高 16 位是清除IO 位,低 16 位是置位 IO 位。需要注意的是 BSRR 只有在写入 1 的时候,相应的功能才有作用,写入 0 是无效的。
(6)GPIOx_BRR 寄存器(x=A~G)
图8
BRR 是 GPIO 的端口位清除寄存器。BRR 基础只有在写入 1 的时候,相应的功能才有作用,写入 0 无效。
(7)GPIOx_LCKR 寄存器(x=A~G)
图9
LCKR 是GPIO 的端口配置锁定寄存器。LCKR 寄存器用来锁定IO 口的配置, 设置后,除了复位后不能再配置 IO 的状态。
三、GPIO 实验
本节实验的内容是对遥控上的指示灯进行控制,这里和在飞控实验中周期点亮航情灯一样,也是周期点亮遥控手柄上的指示灯。
遥控手柄上接到 STM32F103C8T6 上的 GPIO 管脚的指示灯有四颗,分别是电源指示灯、连接无人机指示灯、cocobit 编程模式指示灯以及紧急降落指示灯, 如下图所示。
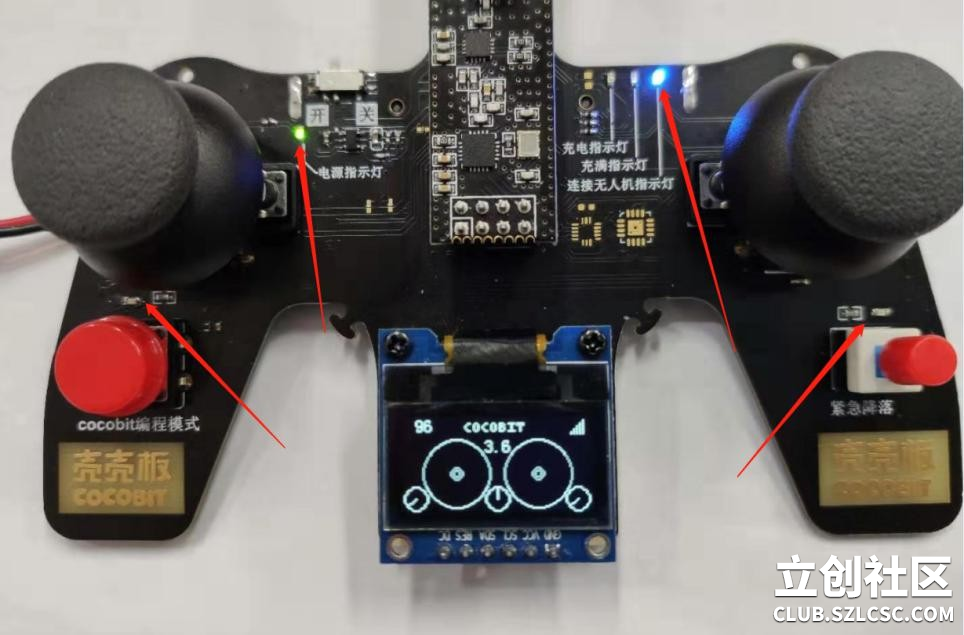
图10
查看原理图,可知四个 LED 指示灯分别对应 PA8、PC13、PB4、PB5。
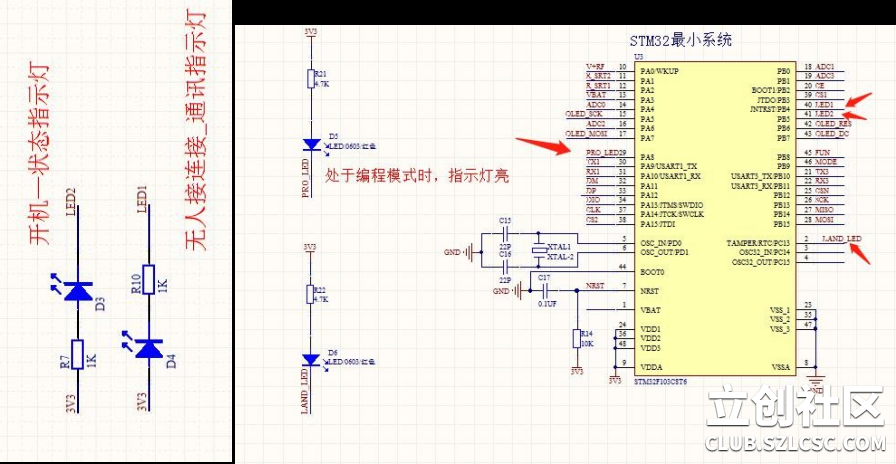
图11
编写代码的思路如下表所示:
代码思路
表2
按照代码思路,编写代码(通过调用官方库) 如下图所示为 GPIO 的初始化部分代码:
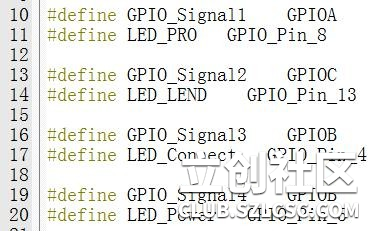

图12
完成配置后只需要周期点亮以及关闭 LED 即可,如下图所示。

图13
其中延时函数,如下图所示。
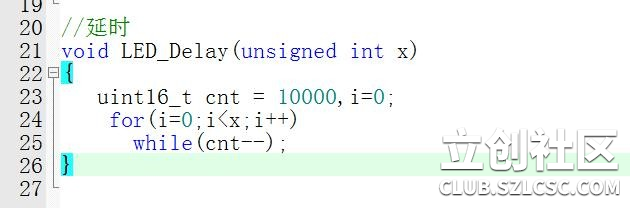
图14
保存、编译、下载,就可以看到遥控手柄的四个 LED 指示灯周期性闪烁, 如下图所示。

图15
部分图片无法上传,有兴趣的伙伴请下载下方的原文件查看
文件下载请点击:【1】GPIO(遥控器指示灯控制).pdf




 返回列表
返回列表


 发表于2022-08-22 14:17:51
发表于2022-08-22 14:17:51



 回复
回复
 收藏
收藏
 举报
举报

