COCOFLY教程
——疯壳·无人机·系列
定高、定点、悬停
图1
一、“定高定点悬停”功能简介
定高定点悬停是衡量一个飞控性能的一个重要参数。只有支持定高定点悬停,才能让无人机稳定地停留在空中不动,才能够实现更多的附加功能,例如航拍等。试想如果无人机左右摇摆,时而往左,时而往右,怎么能够实现航拍呢?
COCOFLY 支持定高定点悬停模式,默认出厂的时候已经设置为激光定高、光流定点,从而可以让飞机稳定悬停空中。
使用遥控设置 COCOFLY 为定高定点悬停的的方法如下,打开遥控与飞机, 确保两则是连上的,然后按下遥控右按键,进入菜单选项,选择“1.飞控设置”, 进入到飞控设置界面,然后把“1.激光定高”打开,具体方法是在“1.激光定高” 处,把右摇杆往右掰,等“否”变为“是”,才按下右摇杆的右按键,可以看到界面回到了主菜单,并且出现了“设置成功”字样。如果“设置失败”,可能是没有连接上飞机。然后再重复同样的步骤进入到飞控设置界面,往下拨到到“6. 光流定点”,然后用同样的方法,打开即可。如下图所示。
图2
二、代码相关
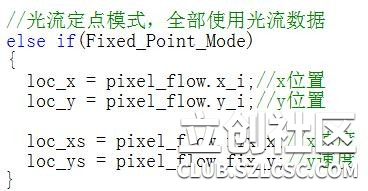
目前悬停的逻辑是,有激光定高优先使用激光定高、否则使用气压计定高; 定点使用的是光流模块,通过判断无人机的位移,实现定点。
光流数据获取的代码如下图所示。
图3
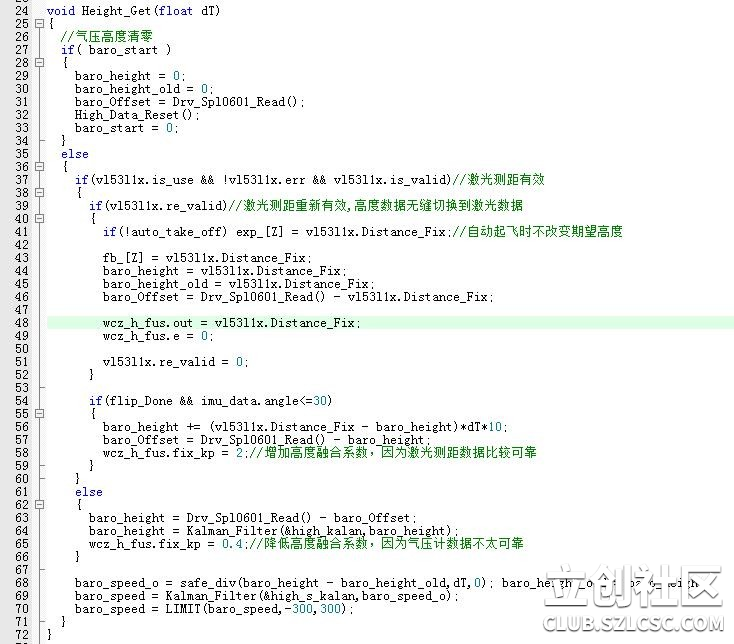
气压计和激光定高处理部分代码如下图所示。
图4
文件下载请点击:【3】定高、定点、悬停.pdf




 返回列表
返回列表


 发表于2022-08-24 15:59:36
发表于2022-08-24 15:59:36





 回复
回复
 收藏
收藏
 举报
举报

