现在常用的舵机控制信号主要有 PWM 信号和串口总线信号两种:其中 PWM 信号控制比较简单,但是 功能只有一个即控制舵机转动; 串口总线信号控制则比较复杂,需要控制器有串口输出功能,但是能实现 较多的功能,除了可以控制舵机转动外还可以获取舵机的各种信息以及对舵机进行各种设置,具体需要配 合相应的协议文件使用。
以下描述怎么使用 PWM 信号控制舵机:
PWM 信号: 一种周期固定脉宽(高电平宽度)可变的连续电平信号。
PWM 信号产生方式有两种:
第一种: 由 MCU 的普通 GPIO 口输出,分辨率较低, 程序比较复杂, 需要使用到定时器;
第二种:由 MCU 的硬件 PWM 输出,分辨率较高,可以达到 1us或更小,程序比较简单,须要 MCU 具备硬件 PWM 功能;
在舵机控制中的 PWM 信号的参数一般为:周期=20ms,脉宽(高电平宽度)范围=0.5ms~2.5ms。

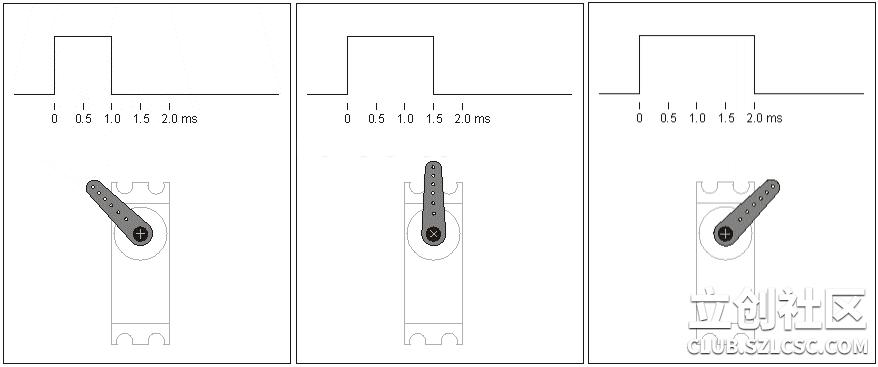
舵机的转动角度由脉宽决定, 例如某个舵机的总转角为 180°, PWM 脉宽范围为 0.5ms~2.5ms ,那么 当舵机接收到不同的脉宽信号时转到对应的位置:
注: 信号脉宽和舵机角度是成线性关系的。
信号脉宽 舵机角度 0.5ms 0° 1.0ms 45° 1.5ms 90° 2.0ms 135° 2.5ms 180°
控制舵机转动效果:
1 、 舵机锁舵:
当信号保持不变时, 舵机会保持在当前位置, 并且输出的扭力会随着负载大小不同而不同。
2 、 舵机快速转动:
当信号改变时, 如信号从 1ms 变为 2ms,舵机会从 45°以最快速度转到 135°位置,这个速度会根据 舵机的本身性能以及负载大小有关, 一般会在规格书上标注有空载时的最大转速。
3 、 舵机慢速转动:
当需要让舵机慢慢转动时,如舵机从 45°转到 135°位置需要耗时三秒,只需要计算出信号脉宽的变 化增量,在三秒的时间内从 1ms 匀速增到 2ms 即可,增量越小则转动的效果越细腻。
程序例子:
一、由 MCU 的普通 GPIO 口输出 PWM:
#include 《reg51.h》
#define uchar unsigned char
#define uint unsigned int
sbit p10=P1^0;
uintaa;
void delay (uintz)
{
unsigned intx ,a;
for(x=z;x>0;x--)
for(a=250;a>0;a-- );
}
void timer0() interrupt 1 //定时器 1 为 0.1ms 一个周期, 输出 1.5ms 脉宽信号
{
TH0=(65536-100)/256;
TL0=(65536-100)%256;
aa++;
if(aa>=200)aa=0;
if(aa<=15) //产生周期为 20ms,高电平为 1.5ms,
p10=1;
else
p10=0;
}
void init()
{
aa=0;
a=0;
p10=0;
TMOD=0x11;
TH0=(65536-100)/256;
TL0=(65536-100)%256;
EA=1;
ET0=1;
}
void main()
{
init() ;
TR0=1;
p10=1;
while(1)
{
}
}
二、由 MCU 的硬件 PWM 输出 PWM 信号:
Step1、初始化 PWM 功能,配置 PWM 时钟为 1us,周期为 20000,占空比为 0,信号电平为高电平有 效。
Step2、当需要改变信号时,只需要在占空比寄存器中写入对应的参数即可,如 0.5ms 则写入 500,2.5ms 则写入 2500.A




 返回列表
返回列表


 发表于2024-02-21 11:30:50
发表于2024-02-21 11:30:50



 回复
回复
 收藏
收藏
 举报
举报

