使用说明
此类舵机的通讯方式采用德晟智能科技开发的RS485串口系列智能舵机通信控制(串口总线 第五版)协议文件。RS485采用平衡发送和差分接收,具有良好的抗干扰能力,信号能传输上千 米。RS485的收与发共用两根线不能够同时收和发(半双工) 。控制器作为主机发送读写指令给 舵机,舵机作为从机根据具体情况执行相应动作或应答。 一条总线上允许挂载多个舵机,且总 线上每个舵机都有一个唯一的 ID(0~250),控制器通过舵机 ID 对特定的舵机进行访问,也可 以通过广播 ID(254)向总线上的全部舵机发送数据,另外可以使用超级 ID(253)向总线上的
舵机发送查询命令,不同 ID 的舵机将进行分时应答。
控制逻辑
电路简图(Electrical Schematic Diagram):
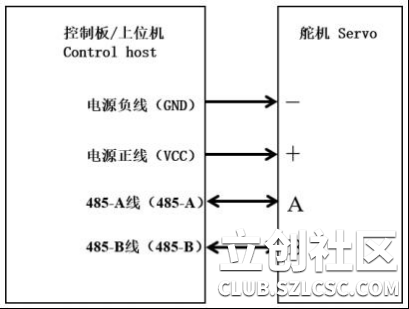
舵机电路简图
串口信号参数(UART signal parameter):
波特率(Baud rate): 1155200(默认值)
数据位(Date bit): 8
停止位(Stop bit): 1
奇偶校验(Patrity): 无(None)
通信方式 (Communication):半双工(Half duplex)
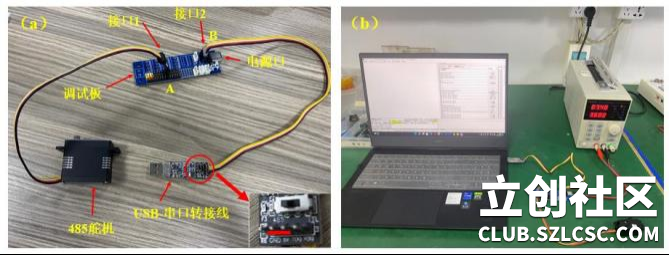
接线步骤
1 、舵机接口 1 连接至蓝色调试板 A 位置(根据电路简图注意区分引脚和正负极),若有多个舵机可依次连接 A 位置其他插口
2 、接口 2 连接至蓝色调试板 B 位置,如图 a 所示;
3 、将 USB- 串口转接线上的 TTL/485 端调至 485 端并连接 PC 端电脑(调试板不能由电脑和电源同时供电,注意接通电源前将接口 2 的红色电源线拔出);
4 、电源口接通电源后打开 SSCOM V5.13.1 串口调试器,如图 b 所示。
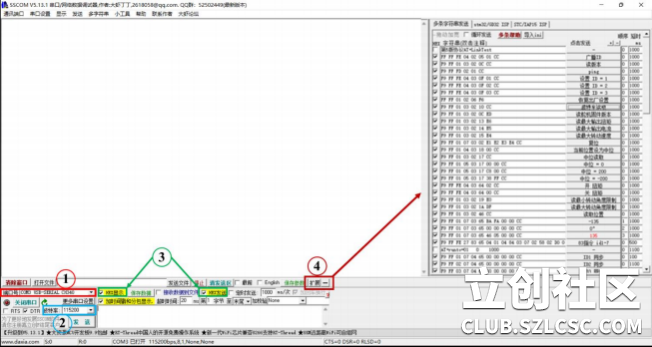
操作步骤
1 、接线完成后打开SSCOM V5.13.1串口调试器;

2 、在端口号中选择舵机对应端口,设置产品目标波特率(默认值为 115200),勾选 HEX 显
示和 HEX 发送功能,点击扩展进入舵机指令读写面板;
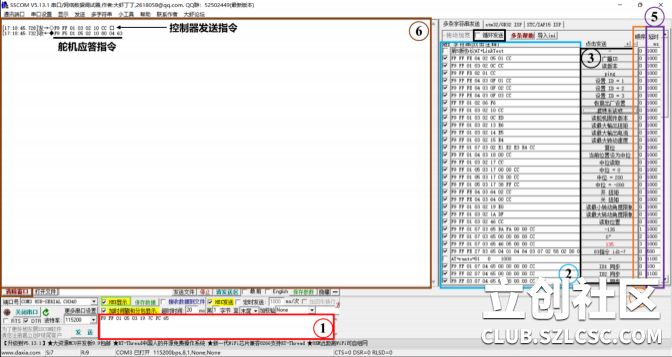
3 、在指令发送窗口①中输入舵机控制指令,复制所输指令粘贴在②号指令存储串口,在③ 号窗口中双击可以对指令进行注释并进行发送;如若循环发送可以在④号窗口中设置指令发送 的先后顺序,点击循环发送后控制器会按照预先设定的顺序对指令进行循环发送;⑤号窗口可 以控制单条指令逐个发送或多条指令循环发送时舵机响应延时时间,单条指令单个发送或多条
指令循环发送后会在⑥号指令显示窗口中显示, 其中“发”代表控制器发送的指令包,“收”代表目标舵机应答的指令包,点击清除窗口可以清空当前窗口指令。
示例说明
本节针对指令格式进行说明,通过相关示例帮助读者更好的理解舵机指令控制功能。
发送帧:
帧头
ID 号
数据长度
指令功能
指令地址
参数序列
数据校验
2 字节
1 字节
1 字节
1 字节
1 字节
N 字节
1 字节
0xF9 0xFF
id
3+N
cmd
adr
发送参数
Checksum
应答帧:
帧头
ID 号
数据长度
指令功能
指令地址
参数序列
数据校验
2 字节
1 字节
1 字节
1 字节
1 字节
N 字节
1 字节
0xF9 0xF5
id
3+N
cmd
adr
应答参数
Checksum
帧 头: 表示指令的开始。
ID 号: 发送方可以使用超级 ID(253)、广播 ID(254)、或目标舵机 ID , 应答方返回自身 ID。
数据长度:等于【ID 号+指令功能+指令地址+参数 N】的字节总数,即=3+N。
指令功能: 用于描述指令的功能类型,如读、写、固件更新等,详见“指令功能列表”。
指令地址: 指令需要操作读写的地址,详见“舵机控制指令地址列表”。
参数序列: 指令中包含的发送/应答参数(根据协议类型进行参数转换)。
数据校验: 采用单字节和校验方式, Checksum= ~( (ID +...+ 参数 N)&0xFF)。
注1:指令包总字节数最大为 256Byte。
注2:发送读指令需要使用超级 ID(253)或目标舵机 ID,使用广播 ID(254)无应答。
示例1 波特率读写指令 _0x10
指令发送帧: F9 FF 01 03 02 10 E9 指令功能:读取01号舵机当前波特率值。
F9 FF :发送指令帧头
01 :舵机ID号
03 :数据长度(3+N,N代表参数序列,此条指令无参数序列,故N=0)
02 :指令功能(02代表读写功能中的读取功能)
10 :指令地址(指令地址10代表读取当前舵机通信波特率)
E9 :数据校验 (校验位通过计算器(程序员模式)计算得到,具体操作如下)
1、打开电脑计算器切换至程序员模式
2、点击16进制HEX 将指令包中的01 、03 、02 、10序列相加得到结果
3、将结果按not换算后取HEX面2位即得到当前指令的数据校验位

舵机应答帧: F9 F5 01 05 02 10 80 04 63 指令功能: 当前舵机通信波特率为115200
F9 F5:舵机应答帧头
01 :舵机ID号
05:数据长度(3+N,N代表参数序列,此条指令包含2个参数序列,故N=2)
02 :指令功能(02代表读写功能中的读取功能)
10 :指令地址(指令地址10代表当前舵机通信波特率)
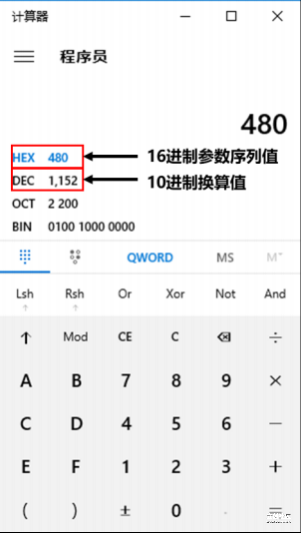
80 04:参数序列(通过计算器(程序员模式)计算得到,具体操作如下)
1、打开电脑计算器切换至程序员模式
2 、点击16进制HEX 输入当前参数序列04 80 (德晟串口总线第5版协议中采用小端模式先发 送低字节数据)换算10进制DEC为1152 ,实际通信波特率为[波特率值]*100,故1152的实际通信
波特率为115200。
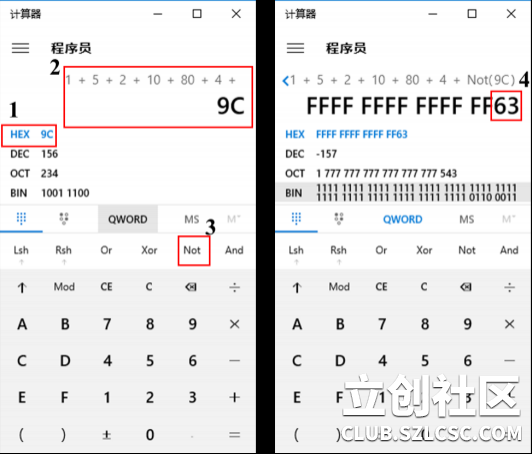
63 :数据校验 (校验位通过计算器(程序员模式)计算得到,具体操作如下)
1、打开电脑计算器切换至程序员模式
2、点击16进制HEX 将指令包中的01 、05 、02 、10 、80 、04相加得到结果
3、将结果按Not换算后取HEX面2位即得到当前指令的数据校验位
示例2 舵机 ID 读写指令 _0x0F
指令发送帧:F9 FF 01 03 02 0F E9 指令功能:读取当前舵机的ID号。
F9 FF :发送指令帧头
01 :舵机ID号
03 :数据长度(3+N,N代表参数序列,此条指令无参数序列,故N=0)
02 :指令功能(02代表读写功能中的读取功能)
0F :指令地址(指令地址0F代表当前舵机ID号)
E9 :数据校验 (校验位通过计算器(程序员模式)计算得到,具体操作同示例1)
舵机应答帧: F9 F5 01 04 02 0F 01 E8 指令功能:当前舵机ID号为01
F9 F5:舵机应答帧头
01 :舵机ID号
04:数据长度(3+N,N代表参数序列,此条指令包含1个参数序列,故N=1)
02 :指令功能(02代表读写功能中的读取功能)
0F:指令地址(指令地址0F代表当前舵机ID号
01 :参数序列(通过计算器(程序员模式)计算得到,具体操作同示例1)
E8 :数据校验(通过计算器(程序员模式)计算得到,具体操作同示例1)
注:写入新舵机ID号可通过指令包F9 FF 01 04 03 0F 02 E7实现,写入新 ID 指令时,如果有
应答,应答 ID 会使用旧 ID 应答,之后切换为新 ID。
示例3 舵机角度定速控制读写指令 _0x65
指令发送帧:F9 FF 01 07 03 65 46 05 64 00 CC 指令功能:01号舵机以100度/秒的速度从当前位置转动至135度位置(顺时针) 。
F9 FF :发送指令帧头
01 :舵机ID号
07:数据长度(3+N,N代表参数序列,此条指令参数序列包含4个字节,故N=7)
03:指令功能(03代表读写功能中的写功能)
65 :指令地址(指令地址65代表当舵机模式转动控制)
46 05 02 00:参数序列(其中46 05代表目标转动角度; 64 00代表100度/秒的速度(若输入00
00则代表最快速度), 通过计算器(程序员模式)计算得到,具体操作如下)
1、打开电脑计算器切换至程序员模式
2、点击10进制DEC, 目标角度135度, 目标速度100度/秒(注:德晟第5版协议实际角度采 用的度数单位是0.1度, 速度单位为度/秒,采用小端模式,从右往左读取),故实际输入角度值
为1350 。实际输入速度值为100 ,如下图所示。

CC :数据校验(德晟第5版本协议中数据校验位可以用CC代替,也可以通过计算器(员模式)计算得到,具体操作同示例1)
常见故障
不良现象
不良现象
可能原因
无功能
信号线损坏、马达掉线、芯片假焊、程序未烧录 或烧录错误
舵机不通讯
串口选择错误、 USB转485/TTL串口异常或损 坏、目标波特率或舵机ID设置错误
反应迟钝,发热严重
电机过流,更换舵机电机
单方向转动后卡住不动
电机的正负极或电位器的端线接错
手感重
齿轮装配不顺畅、底盖压到PCBA、马达内部短 路损坏、油脂过量
舵机抖动
齿轮装配不顺畅、电位器损坏、程序问题
噪音大
齿轮少油、卡齿、蹦齿、齿损
电流大
线序或马达线接反、齿轮卡死、底盖与PCBA短 路、牙箱偏紧导致参数不匹配无法走到目标位置
舵机不回中
电位器损坏或来料不良、电位器与输出齿连接虚 位大、输出齿与客户摇臂或连杆虚位大或卡死
扭力偏差大
选型与规格要求存在偏差、齿轮长时间运行过热 磨损
角度偏差大
电位器损坏或来料不良、电位器与输出齿连接虚 位大、控制信号与规格要求不符
常见问题
问 1:舵机固定在产品上,用外壳定位偏差很大?
答 1:舵机装配以输出齿圆心为中心定位,尽量用两边耳朵孔作固定。
问 2:舵机塑胶齿轮不耐冲击,容易蹦齿?
答 2:需考虑离合齿的舵机来应用,避免产品外部冲击大于堵转扭矩使蹦齿。
问 3:舵机输出齿承受外部冲击导致损坏,输出齿不够强?
答 3:尽量用舵盘及产品结构件支撑来承受外部冲击,避免细小的输出齿承受其大于舵机堵转扭矩的冲击力。
问 4:舵机连接后不通讯?
答 4:重新插拔 USB 串口,检查舵机 ID 和波特率是否设置正确。
注意事项
1 、请在工作电压和电流范围内使用,切勿超压或过流,以免舵机烧坏或内部损坏。
2、接线前请严格按照接线步骤操作,以免舵机无功能或者不能正常工作。
3、大扭矩舵机使用时务必小心谨慎,防止误操作造成人身伤害。
4、切记不要在舵机工作状态下再向总线上增加新舵机。
5、本产品为高精度产品,请勿人为大力转动舵盘或摆臂,以免产品内部损坏。
6 、切勿在超高负荷状态下运转舵机,尽量选择合适运行转矩。




 返回列表
返回列表


 发表于2024-03-06 11:02:48
发表于2024-03-06 11:02:48



 回复
回复
 收藏
收藏
 举报
举报

