



 返回列表
返回列表
|
查看:
15552
回复: 25 |
进化传说 之 上古蜥蜴 第一帖:履带底盘的结构部分
|
|||


风过琴弦
28
主题
169
回复 |
1#
电梯直达

写在前面:看着网上那些履带底盘,怎么看怎么不舒服,还是决定自己做。这样就带来一个很大的问题,就是很多结构件都要用3D打印。我自己有3D打印机,下面不但会给出设计,还会给出实物照片。但是,对于没有3D打印机的朋友就比较麻烦了。解决的办法,一是淘宝有这类服务,要花一点钱。二是采用替代方案,比如履带底盘改为轮式底盘。给大家造成的不便,先说句不好意思了。 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。 首先讨论一下履带底盘的总体结构。对于我们造的这只生物来说,要关注下面这些要素: 一,驱动轮。顾名思义,连接着电机,驱动履带正反转动,在真实车辆上,多数是一台发动机,通过差速器连接左右两个驱动轮。在电动模型中,一般是左右两个电机分别驱动左右两个驱动轮。驱动轮一般是后面翘起来那个。 二,承重轮或者叫负重轮,及其悬挂。负重轮就是中间部分那一排一样的,这一部分不但负重,而且负责减震任务,因此都有个或简或繁的悬挂。所谓悬挂就是轮(包括轴)与车身之间连接的部分。为了减震同时又有各种功能、性能,现在(除了低端自行车或者牛车)已经没有轮轴直接固定在车身上了,买车的时候,悬挂也是主要指标之一。 三,导向轮,就是前面翘起来的那个。 四,履带。很久以前曾经想过用3D打印自己做,后来放弃了,原因是。。。丫的太麻烦了,几百节,每节都要几十分钟,3D打印的速度太慢了。最近又上万能的某宝看了下,终于有卖成品了,哦耶 五,电机固定支架。要选购电机、驱动轮、码盘、编码光耦模块,然后设计一个支撑结构,把这些东西拼一起。 下面对这些部分分别讨论。
>>>本帖是第二届立创商城电子制作节开源作品参赛《进化传说 -- 上古蜥蜴》的分帖之一,索引主帖:http://club.szlcsc.com/article/details_7053_1.html#floor_5。 编辑原因:增加返回主帖入口

电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
风过琴弦
28
主题
169
回复 |
2#
本帖是参赛贴《进化传说之上古蜥蜴》的分贴之一,主贴
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
风过琴弦
28
主题
169
回复 |
3#
现在正式开始动手开工了!首先就是买买买。。。 第一大麻烦是履带,自己用3D打印吧,3D打印最大的特点就是 -- 慢!,一两百节,然后再拼装。。。最好是有现成的。几年前在淘宝上找过,没有合适的,都是太小,想想玩起来就不爽。这次又看了一下,还好有合适的!说实话,如果没有这个,恐怕就做不了履带底盘了,那就只能是轮式的了
然后是驱动轮,驱动轮的问题是,3D打印的精度不够,轮齿不一定能吻合履带孔,同时强度也不够。还是希望能强力一点嘛。第一反应肯定是卖履带那家,果然,有配套的驱动轮,太爽了 
然后问题就来了,店家自己的驱动轮,和履带肯定是配套的(齿孔),和店家确认一下就行了。但是和电机呢?联轴器孔径有4、5、6mm几种,选哪种呢?这个要看电机啊,对啊,那么还是先选电机
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
风过琴弦
28
主题
169
回复 |
4#
某宝上,减速电机也是大把,没多会就选中了一款,都加入购物车了。。。但是,有句话怎么说的来着。。。我不是随便的人。。。作为技术宅,买东西不能不看参数! 这就要一点工作量了,不是每家卖家都有参数,而且对这个东西的不熟悉,没办法拿到参数就判断好坏,只能多找几家比较。忙了半天,成果如下
剔除一看就不靠谱的,比如店铺主要卖袜子捎带卖电机的,比如店铺名称叫什么taobao1998的,这是看起来比较像样的三家店的参数比较,至少从数据看,还是有明显差别的,第一家明显要好一些。咱不是国家重要项目,没法买来实物一一对比了,只能看数据说话,说什么?买买买啊,我的银子。。。
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
风过琴弦
28
主题
169
回复 |
5#
接下来的问题是负重轮的悬挂结构 天下大多数东西,自古以来都有无数人发明了五花八门的各种变种,稍微研究一下,就让人眼花缭乱。悬挂说白了就是车轮(轴)和车体之间装个弹簧,用来减震。但是一个简单的东西被弄出了不知多少种花样,怎么知道哪种合适呢? 好在网上前辈大神做了很多工作,让我们得以 这里是铁血社区大神 强权就是真理 的帖子,总结分析了五种广泛使用的坦克悬挂。http://bbs.tiexue.net/post_12061608_1.html?s=data
这个问题其实考虑已经有段时间了,在各种悬挂之间也比较犹豫。 下图:我的犹豫
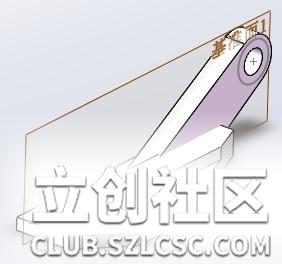
最终决定用一种类似下图的结构,算是平衡式,也结合了克里斯蒂式的元素。
到底是什么样的呢?跟着我做出来就知道了
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
风过琴弦
28
主题
169
回复 |
6#
决定了结构之后,还有一件事就是上网买轴承
尺寸 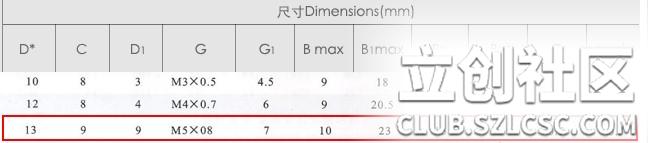
价格
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
风过琴弦
28
主题
169
回复 |
7#
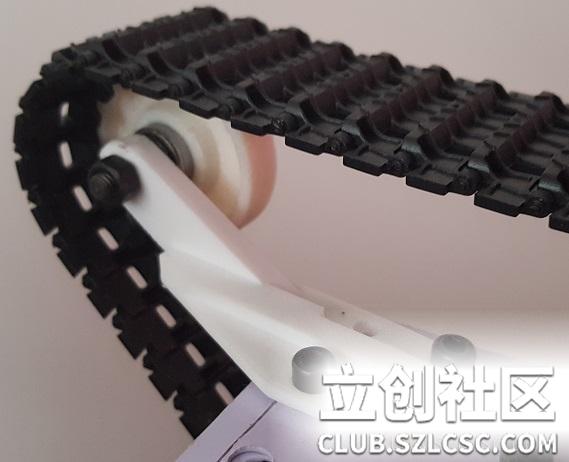
负重轮本身也有选项:大轮和小轮,是不是听着很智障。。。然而确实有这方面的讨论。 蜥蜴用的算是大轮吧,主要还是和驱动轮比的,直径和驱动轮差不多。采用大轮的原因:成本低啊,四到六个大轮,如果换成小的,怎么也要多出两个来,轴承、悬挂、弹簧、3D打印,成本都要高些
Solidworks 设计: 

3D打印出来的实物就是这样了: 
这里面有个问题要注意:轴承的外径是13mm,但是轮的内径是13.2mm,这是因为3D打印时,材料从打印头挤出,堆积在下层,会有少许的溢出,也就是所有外缘都要“膨胀”出来一点。具体是多少,和自己的3D打印机有关,也和打印参数有关。我第一次尝试是用的13.4mm,稍有点大了。你如果自己打印,也要先试一个。
这里是sldptr文件和打印用的stl文件:
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
风过琴弦
28
主题
169
回复 |
8#
负重轮的悬挂设计成这样的
实际打印出来
中间加上弹簧。弹簧第一次买的还不合适,略短了一点 下面那个 轮与轴用紧配合 接下来就该把他们拼一起了。
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
风过琴弦
28
主题
169
回复 |
9#
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||

NoThing
2
主题
43
回复 |
10#
哎,看起不错的样子。我是不是也得把我得打印机弄起来了
|
|||
|
跳跳跳虎
1
主题
67
回复 |
11#
帮顶,,不错哦
|
|||
|
钉子电源
2
主题
39
回复 |
12#

高性价比中小批量定制电源!电源行业的嘉立创。WWW.DZ-POWER.COM
|
|||
|
风过琴弦
28
主题
169
回复 |
13#
作为行业内人员,做个东西,既是自己玩,也是提升专业技能。3D打印算是机械行业,无论拓展自己视野,还是日常做些实用或者艺术性的小玩意,或者做些工作上的小东西,个人觉得都是有价值的
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
风过琴弦
28
主题
169
回复 |
14#
多谢关注啊 最近有点焦头烂额,蜥蜴处于调试和修改中,其中很多东西第一次玩,需要大量的时间,包括机械结构部分,也包括树莓派上的相关内容(树莓派上主要是python、Tensorflow和一点神经网络的初步学习,Linux和树莓派本身的使用会涉及到一点点,应该是本项目的第三贴)。工作上最近也恰好很忙,毕竟赚钱吃饭是万事的基础嘛。。。终于赶在截止前挤出一天多的时间来整理和更新。
不说废话了,先上图 距离底盘部分初步可以动起来,还差一个前导轮的支撑结构 这么简单的一个结构,这已经是第三版,针对前两版进行了加粗加强。这东西,打印出来用手掰一掰,觉得强度不错了,但是需要受力的时候还是不够。一是塑料毕竟不比金属强度大,二是3d打印本身也比注塑成型强度差不少,三是对机械结构专业内容(材料力学?)一点都不懂,缺乏最起码的估算(感觉应该可以用打印出来的东西,比如可以专门打印一个标准件,大体估算材料的各种强度特性吧)。这一点上,有点像民科了---- 完全靠感觉,哈哈
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
风过琴弦
28
主题
169
回复 |
15#
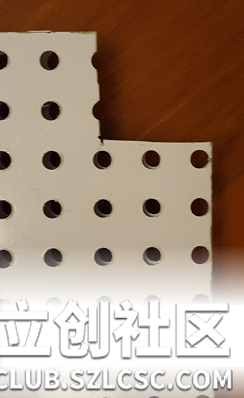
底盘的主体部分,也就是真正的“底盘”,用洞洞板来充当。这是挂铁丝钩子、上面挂工具、卖品用的,可以按要求裁切。选一个稍微厚一点的,让店家帮裁切成合适的尺寸。 如果只是搭载电子设备之类重量不大的,单层就可以了,我这里想要强度大点,让店家切了两块一样大的,重叠在一起,从上图也可以看出。
需要提一句的是,由于电机及驱动轮的安装位置和履带的环绕,洞洞板需要裁掉一个角
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
风过琴弦
28
主题
169
回复 |
16#
电机及固定部分:
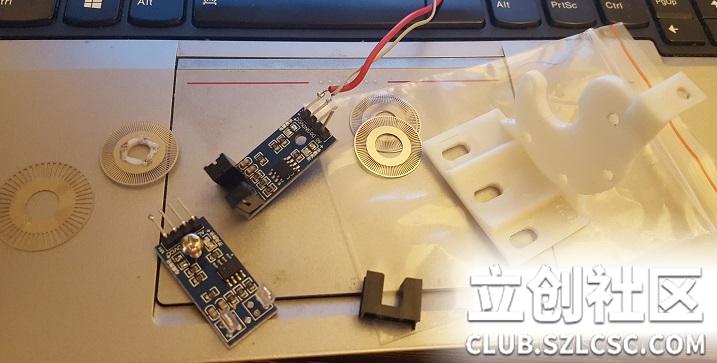
本来的计划中,电机的测速应该是很简单的一个问题,我已经买好了相关的东西:码盘、光耦,还打印了相应的小部件 然而忙活了几天还是觉得,需要的精度对于3D打印来说有点太高了,所以最终还是决定放弃原来的电机,转而买带测速机构的减速电机 如果有朋友已经跟着我买了前面的电机,真的是抱歉了 这个电机除了前面有减速器之外,尾巴上还带一块磁铁,带两个霍尔开关传感器,可以输出两路脉冲信号。提醒一下,我买的这家淘宝页面上给出的接线是错的,要跟客服要。 主要规格:37(尺寸),空载转速178,负载转速112,电压12V,霍尔传感器的电源(包括com)与电机电源分开,这样电机和测速可以分用两组电池(或者电源)供电。霍尔传感器可工作于3.3V。
下面是电机固定部分。 电机、减速器(及测速机构)是一个整体,驱动轮通过联轴器与电机减速器刚性连接,这样所有这几个组件成为一个整体固定在底盘上。 在调试过程中意识到一个重要问题,就是驱动轮的角度需要比较精确,不能有角度上的移动,否则会导致履带脱落。 由于在负重、启动、上坡过程中,驱动轮的受力还蛮大的,所以要求对电机/驱动轮组件的固定要有足够的强度。 经过多次尝试,现在采用下面这种两件组合的结构来固定电机,还算不错。 上图是电机侧面固定在底盘上的部分,如果有朋友跟着做的话要注意一下,这张图有一个大的圆孔是用于电机轴承伸出来的,这个孔的位置导致这个结构在左右两侧不是一样的,而是对称的。 打印的时候如果同样的东西打两份,那么对侧的转过180度后出轴孔的位置就不一样了,所以一定要做一下调整。在3D打印切片软件Cura里有个功能“对称”,可以生成一个对称的物件,所以就不必做两份设计文件了,直接在cura里面修改就好。
下图是固定结构的另一部分
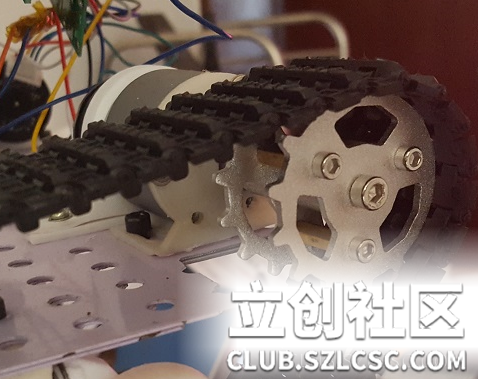
固定好之后是这个样子的:
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
风过琴弦
28
主题
169
回复 |
17#
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
风过琴弦
28
主题
169
回复 |
18#
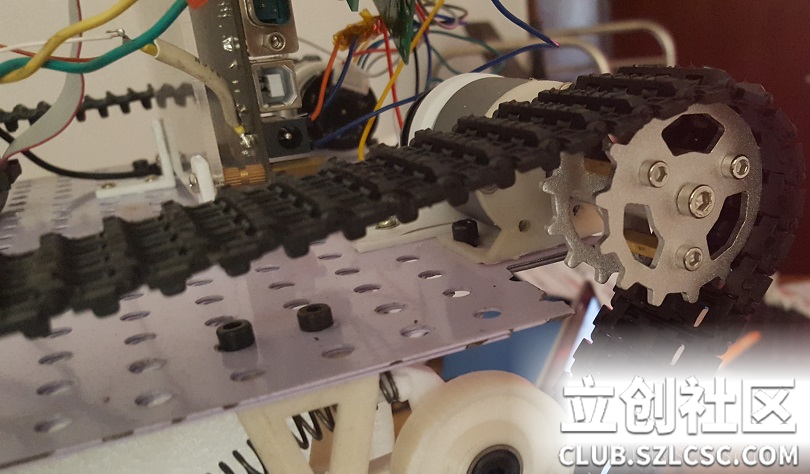
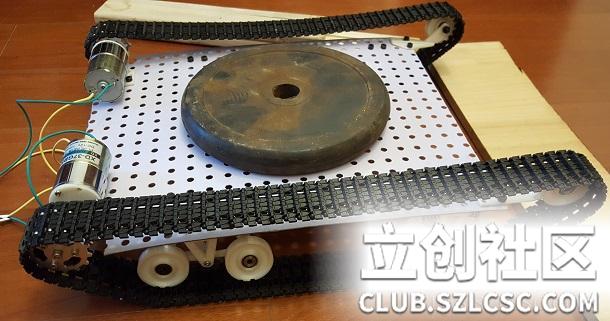
底盘的部分到此就差不多了,剩下的就是用螺丝把它们装起来 加一个杠铃上的2公斤的重片,只是底盘下沉了一点,仍然可以过障碍 视频正在审核。。。
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
风过琴弦
28
主题
169
回复 |
19#
从最开始计划这个项目,到底盘这个最基本的部分完工,花了很长时间,也学到了很多东西,主要还是对机械结构的熟悉。唉,做技术,书到用时方恨少啊。 我自知,在蜥蜴的机械设计方面有很大不足,例如,连公差都没有,如果有朋友能给出一点指点,当不胜感激之至。 项目的名字想了很久,其中有“进化”两个字,是打算今后还会不断改进、不断完善。当然还不是现在,现在还是按照最早规划的,先做出一个可以运行的雏形,还有很多其他部分需要努力。下面,是转战驱动电路的时候了 http://club.szlcsc.com/article/details_7856_1.html (本帖用于后续的改进及相关问题探讨)
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
BeBetter
2
主题
57
回复 |
20#
挺帅气,支持一下
|
|||

ChessWorld
36
主题
820
回复 |
21#
看起来不错啊! 中国版“虎式坦克”

|
|||
|
风过琴弦
28
主题
169
回复 |
22#
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
|||
|
十面埋伏
0
主题
1
回复 |
23#
你这个可以有啊,要是把减震做好,结构搞牢固。这个履带跑个高速我想一定很爽
|
|||
|
一本道君
1
主题
252
回复 |
24#
看了视频,非常不错! 履带缺乏涨紧轮,高速下会抖得厉害
|
|||
|
一本道君
1
主题
252
回复 |
25#
能做到差速旋转吗
|
|||
|
风过琴弦
28
主题
169
回复 |
26#
多谢关注!你说的非常对,缺张紧轮。好几年前的了。本来想做个东西会吸引一些人一起玩,后来实在没人参与,就懒得改进了。 你后面说的应该是用差速器控制转弯的方案吗,也有别的朋友这样建议,但是我觉得差速器需要增加机械控制机构,然后这个控制机构最终还是需要由另外一个电机来执行,而这个电机还需要控制电路,这样不如直接用电路驱动动力电机。所以最后方案还是定为两个动力电机分别驱动一条履带。转弯就是通过两条履带转速不一样来实现
电源模块(小功率AC-DC)小体积,多年稳定应用,qq:1239283833
|
 发表于2017-06-24 23:17:20
发表于2017-06-24 23:17:20


 回复
回复
 收藏
收藏
 举报
举报
























|

